





























Maintenance and inspection procedures 5-134
(2) RH-3FRHR series
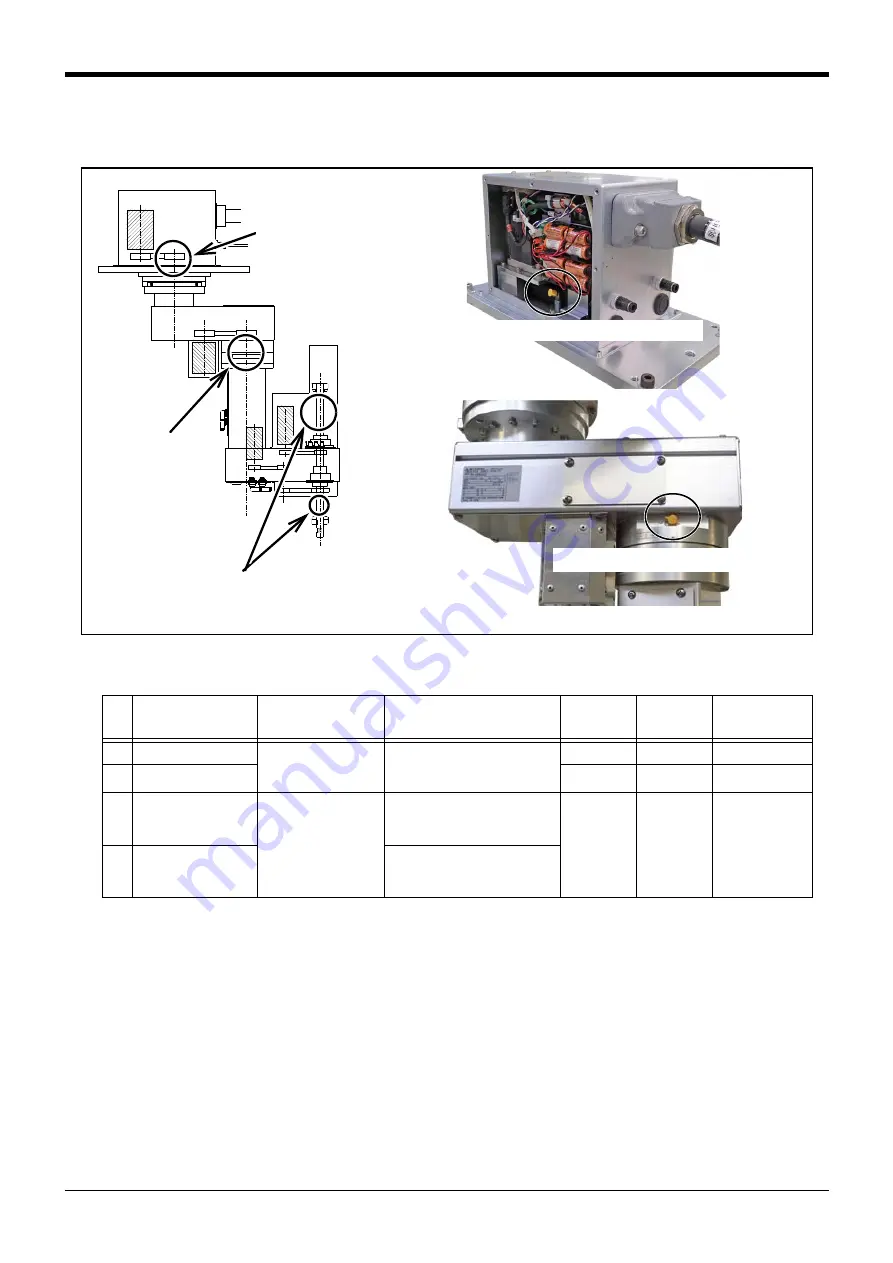
■ Lubrication position and specifications
Fig.5-24 : Lubrication positions (RH-3FRHR series)
Table 5-11 : Lubrication specifications
[Caution]
・ The brand name of the grease shown in the
is the grease put in at shipping.
・ The lubrication interval is a cumulative value of the operation at the maximum speed. If the operation has been
suspended, or if the designated speed is slow, the lubrication time can be lengthened in proportion.
・Depending on the robot operation state, the lubrication interval will fluctuate, so determine the time according to
the state so that the grease does not run out.
・ By the maintenance forecast function of RT ToolBox3 (option) computes the guide of the lubrication hours put
together with the customer's operation status.
・ The numbers in the
correspond to the supply positions in
.
・ Because excessive lubrication leads to the grease leak, avoid it. And the number of times of lubrication limits to
3 times. The maintenance after it needs the overhaul work which replaces internal grease. Contact the dealer.
No.
Parts to be lubricated
Oiling method
Lubrication oil
Default charge amount (maker)
Lubrication
interval
Lubrication
amount guide
Cover to remove
<1> J1 axis reduction gears
Grease nipple
WC-610(Only addition)
Grease
Harmonic grease SK-1A
(Harmonic Drive Systems Inc.)
6,000 Hr
4.1 g
Base cover B (L)
<2> J2 axis reduction gears
6,000 Hr
1.8 g
-
<3>
Shaft
(General environment/
Clean specification)
Wipe the old grease, and
apply new grease
Marutenpu PS No.2
(KYODO YUSHI CO.,LTD. )
Every
2000km
movement
1 g
Motor cover J3
<4>
Shaft
(Waterproof specifica
-
tion)
NOK Klubersynth UH1 14-222
(NOK CORPORATION)
<1> J1 axis lubrication port
<2> J2 axis lubrica
-
tion port
<3> Shaft lubrication
<1> J1 axis lubrication port
Note)
<2> J2 axis lubrication port
Note)
Note) With the grease nipple cover (yellow)







































































