





























2Unpacking to Installation
Installation 2-10
If it is difficult to follow the transportation procedure shown in this section, take
countermeasures not to allow the joints of the robot arm freely move by fixing the robot
arm in such a way as to take advantage of the screw holes for fixing plates or the like.
Otherwise, applying an excessive power on the joints by external forces may cause a
malfunction.
Do not apply an excessive load to the robot arm while fixing it. Otherwise, the robot arm
may be damaged.
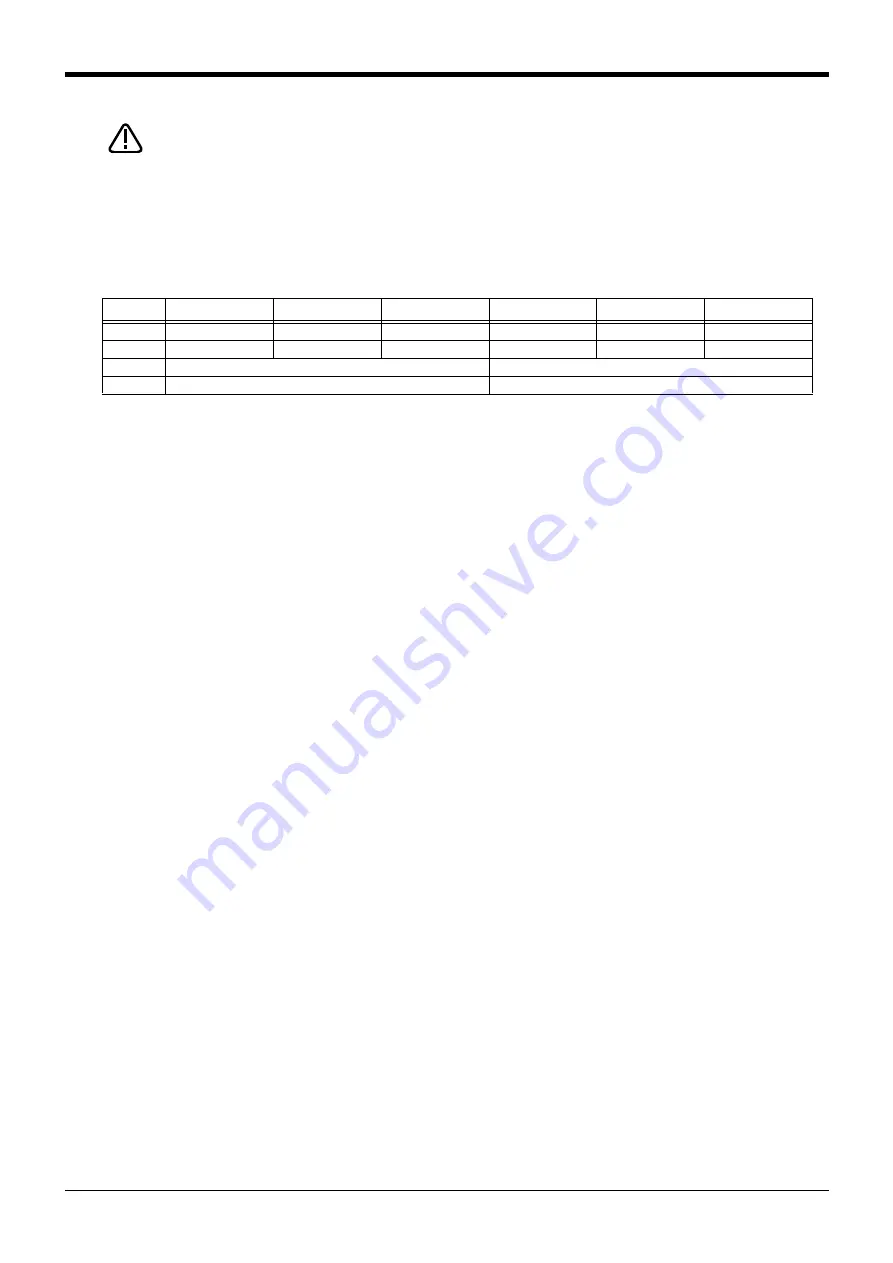
Table 2-2 : Transportation posture (RH-3FRH/6FRH series)
Axis
RH-3FRH35**
RH-3FRH45**
RH-3FRH55**
RH-6FRH35**
RH-6FRH45**
RH-6FRH55**
J 1
49.5 deg.
25 deg.
17 deg.
57.5 deg.
28 deg.
19 deg.
J 2
-139.5 deg.
-115 deg.
-107 deg.
-147.5 deg.
-118 deg.
-109 deg.
J 3
290.4mm
290.4mm
J 4
Not fixed
Not fixed
CAUTION







































































