


























5-112
5 Maintenance and Inspection
For safety purposes, the step for releasing the brakes must be carried out by two
workers. One worker must operate the T/B, and the other must support the arm.
When the brakes are released, the robot arm could drop by its own weight depending
on the posture.
If [F1] key or enable switch of T/B is released, the brakes will be work immediately.
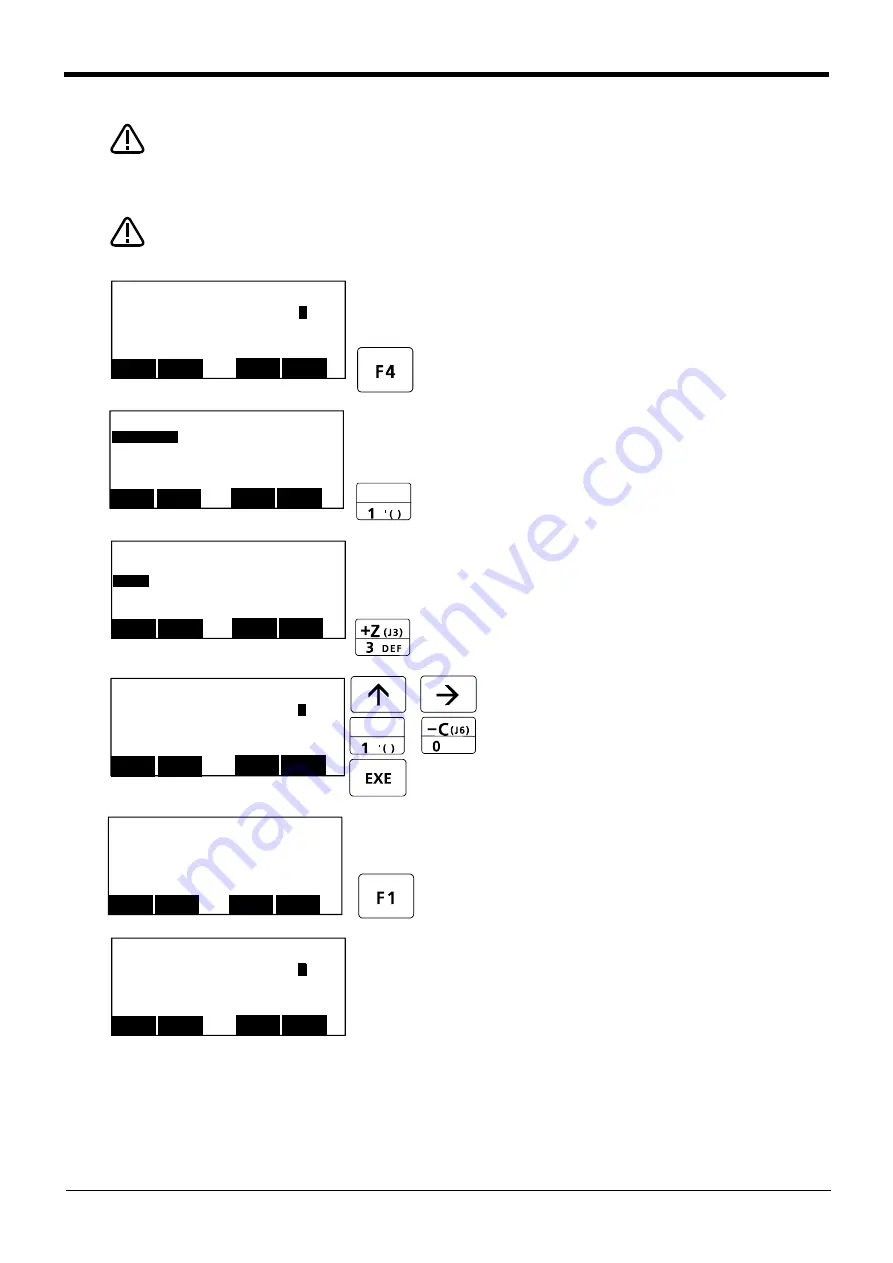
8) Detach the [F1] key and work the brake.
Press the [F4] key and return to the origin /
brake screen.
9) Press the [1] key, and display the Origin setting
selection screen.
10) Press the [3] key, and display the Tool selec
-
tion screen.
11) Input "1" into the J3 axis. Set "0" to other
axes.
12) Press the [EXE] key, and display Confirmation
screen.
13) Press the [F1] key, and the origin position is
set up.
14) Setting of the origin is completed.
15) Refer to
Page 125, "5.6.4 Recording the origin
in this manual, and record the origin data
on the origin data seal.
CAUTION
CAUTION
<BRAKE>
J1:(
0
)J2:( 0 )J3:( 0 )
J4:( 0 )J5:( 0 )J6:( 0 )
J7:( 0 )J8:( 0 )
CLOSE
123
REL.
1
0
<ORIGIN/BRAKE>
1.ORIGIN
2.BRAKE
CLOSE
123
<ORIGIN>
1.DATA 2.MECH
3.TOOL
4.ABS
5.USER
CLOSE
123
~
SPACE
<TOOL>
J1:(
1
)J2:( 0 )J3:( 0 )
J4:( 0 )J5:( 0 )J6:( 0 )
J7:( 0 )J8:( 0 )
CLOSE
123
REL.
1
0
<ORIGIN> TOOL
CHANGE TO ORIGIN. OK?
No
123
Yes
<TOOL>
J1:(
1
)J2:( 0 )J3:( 0 )
J4:( 0 )J5:( 0 )J6:( 0 )
J7:( 0 )J8:( 0 )
CLOSE
123
REL.
COMPLETED
1
0







































































