



























2-28
Confirming the operation
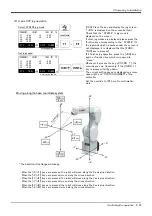
Fig.2-17 : CYLINDER jog operation
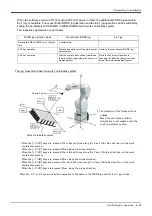
Fig.2-18 : WORK jog operation
+X
+Y
+Z
-Z
-Y
-X
ツ
ー
ル
長
制御点
半径
上下
円弧
* The current position is set as the arc centering on the Z axis, and the axis moves along that arc, expands
and contracts in the radius direction, and moves vertically. At this time, the flange surface posture is
maintained. Also, while maintaining the flange surface position, the flange surface posture changes.
Control point
T
oo
l l
en
gt
h
Vertical
Radius
Arc
* While maintaining the flange surface posture, the axis moves straight along the work coordinate system.
Also, while maintaining the flange surface position, the flange surface posture changes.
* When the controller software version is R5 (F-Q series)/S5 (F-D series) or later, jog operation around
the work coordinates system is available (EX-T jog). In this jog operation, when the jog operation is
performed for the posture elements, the posture rotates on the Xw axis, Yw axis, or Zw axis of the work
coordinates system while the control point is changed.
+X
+Y
+Z
-Z
-Y
-X
ツー
ル長
+Xw
+Yw
+Zw
-Zw
-Xw
-Yw
+Yw'
+
-
+
-
+Xw'
+Zw'
-
+
-Yw'
-Zw'
-Xw'
WORK coordinate system
Control point
Too
l len
gth



































































