



























3-68
Installing the hand input cable
3Installing the option devices
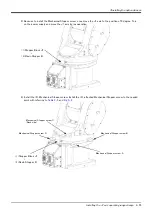
4) Fixes the cable clamp box securely by the fixing screws as before. Installs carefully so that the cable may not
be inserted.
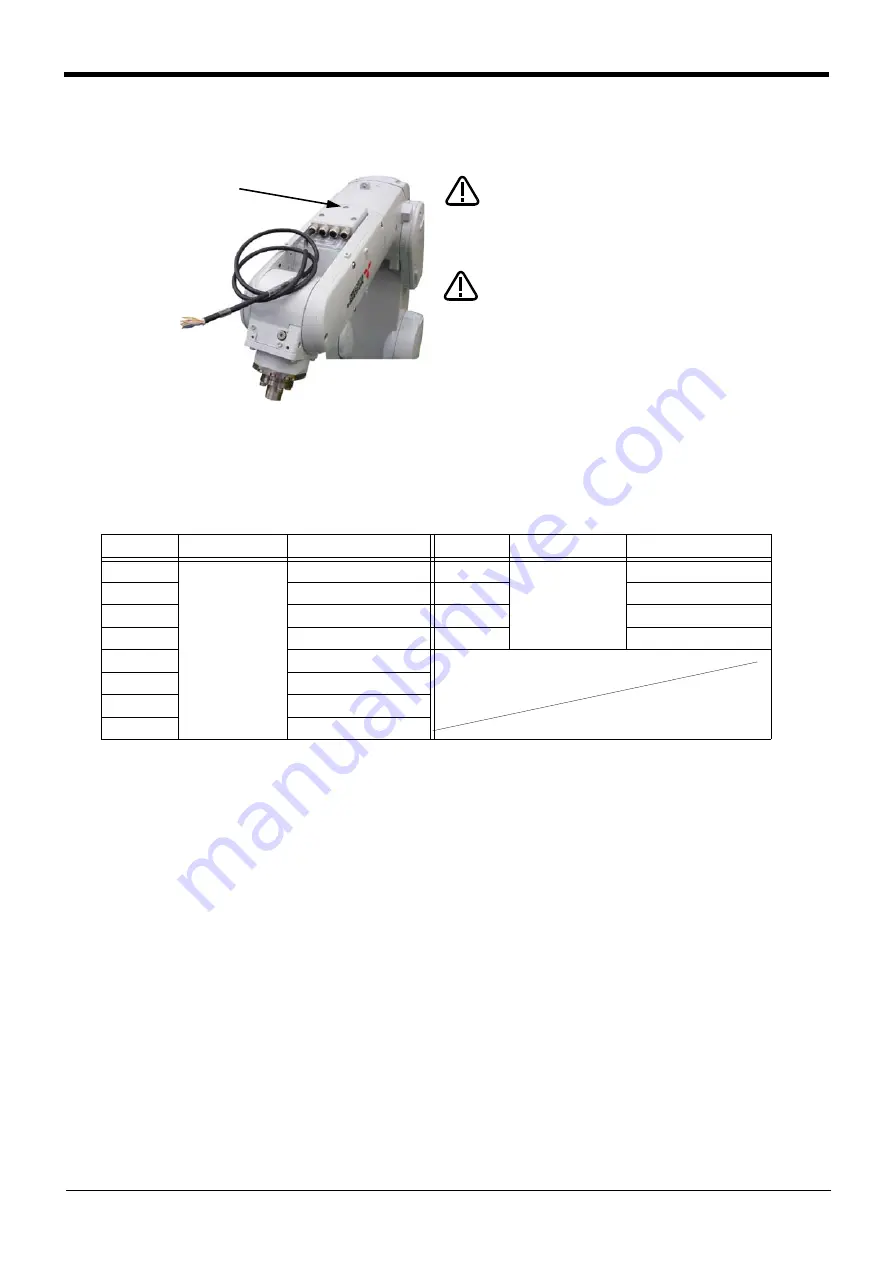
This completes installing the cable clamp box. Pin assign of the hand input cable is shown in
Table 3-8 : Pin assign of hand input cable
Color
Connector
Note1)
Note1)The connector shows the connector name connected to the robot-arm side.
Pin number: names
Color
Pin number: names
Purple
OP1
A1: HC1
Yellow
OP3
A1: +24V
Brown
A2: HC2
Green
A2: +24G (RG)
Blue
A3: HC3
-
Reserved
Black
A4: HC4
-
Reserved
Red
B1: HC5
White
B2: HC6
Gray
B3: HC7
Pink
B4: HC8
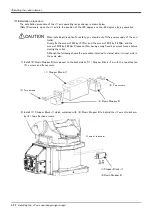
* The figure is the example to which the J4 axis was
moved to upside down position by jog operation.
When you install the cable clamp
box, be careful to not put the
cable between the cable clamp
box and arm. If the cable is inserted, it will become the cause
that the cable be broken.
CAUTION
Fixing screws
(Three places)
When this cable is connected to
the robot the power supply is
applied to the end of this cable. The end of the cable is free at
factory shipping. so, if the tool side is not connected it may be
cause of the trouble such as broken the fuse by short circuit.
Before connecting to the robot, customer should check
whether or not the cable tip has been properly treated.
CAUTION



































































