

























3Installing the option devices
Installing the J1 axis operating range change 3-51
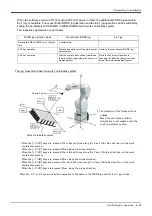
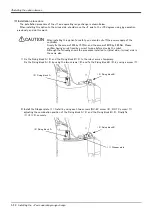
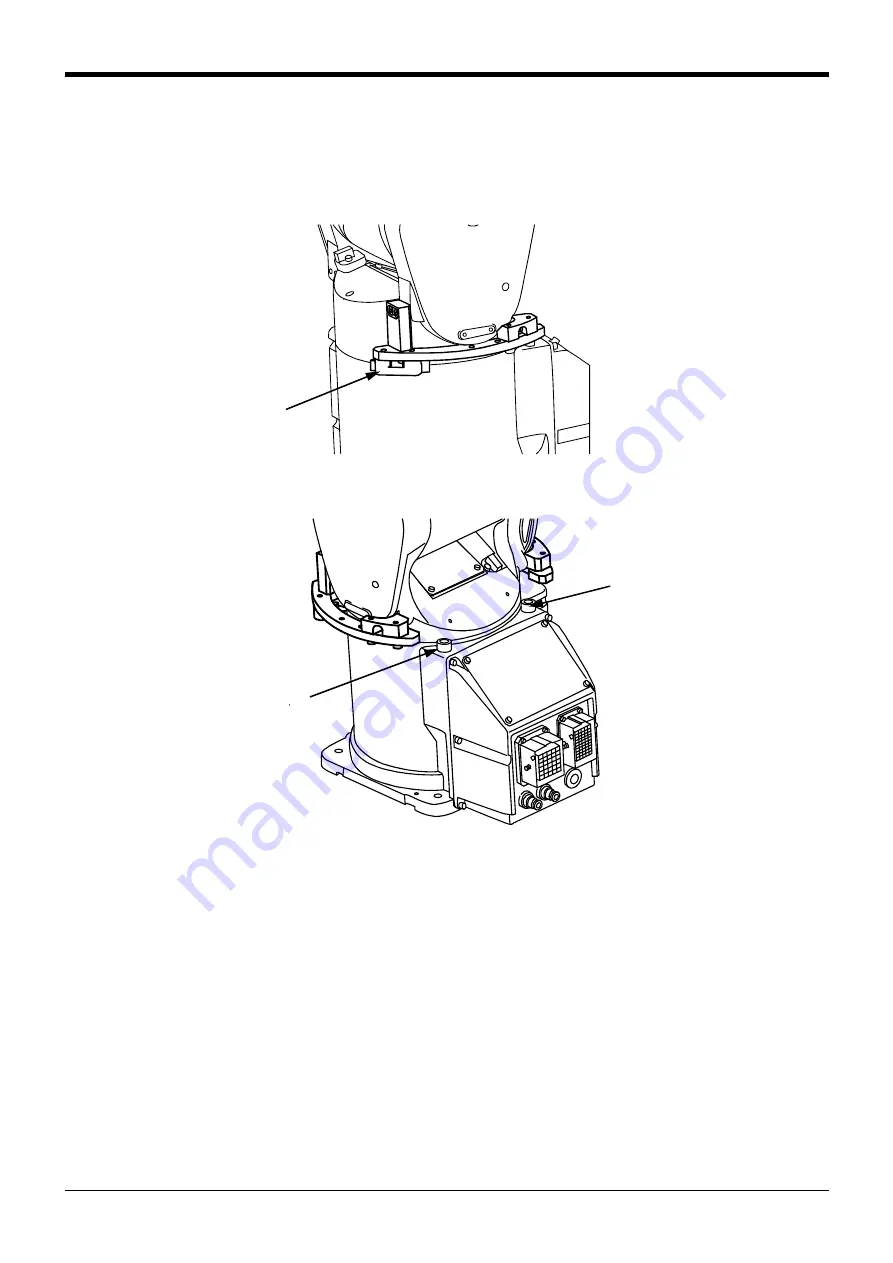
3) Install the Variable stopper block <5> by using two screws (RV-4F: screw <8>, RV-7F: screw <7>). There
are two installation positions in the +/- side respectively. Install to the position of the angle which limits the
operating range with referring to
.
Install the minus side in the same way. Move the J1 axis to the +70 degrees using jog operation previously,
and install. (Turn on the power supply and move the J1 axis by jog operation) After installation, turn on the
power supply and move the J1 axis to the 0 degree by jog operation.
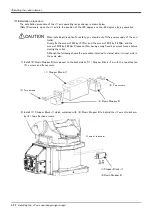
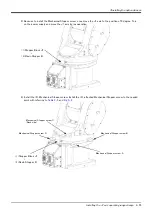
4) Install the Mechanical stopper screw A or B. Install the necessary screw with referring to
(4) Setting the parameter
Specify the operating range to parameters MEJAR with appropriate values (variable angles given in
or
) by the following steps.
1) Turn on the power supply.
2) Set up the operating range changed into parameter MEJAR.
MEJAR: (J1 minus (-) side, J1 plus (+) side, ***, ***, ***, ...).
Note) Refer to the separate "Instruction manual/Detailed Explanation of Functions and Operations" for the
details of the setting method.
(5) Check the operating range
After changing the parameter, turn off the controller power and turn on again. And, move the axis changed by
joint jog operation to the limit of the operating range. Confirm that the robot stops by limit over at the changed
angle.
This completes the procedure to change the operating range.
<5>
Variable stopper block
Mechanical stopper screw A
Mechanical stopper screw B




































































