





























3-72
Installing the Forearm external wiring set/ Base external wiring set
3Installing the option devices
3.5 Installing the Forearm external wiring set/ Base external wiring set
The installation procedure of Forearm external wiring set/ Base external wiring set is shown below. To pull out the
cable of the same purpose as the forearm side and the base side, you should use this option in pair. Turn the
controller’s power OFF before this installing operation. Refer to
Page 82, "5.3.2 Installing/removing the cover"
for
removing/ installing the cover.
Note) Although the robot's figure described to each page is RV-4F series, the method is the same on other robot
series.
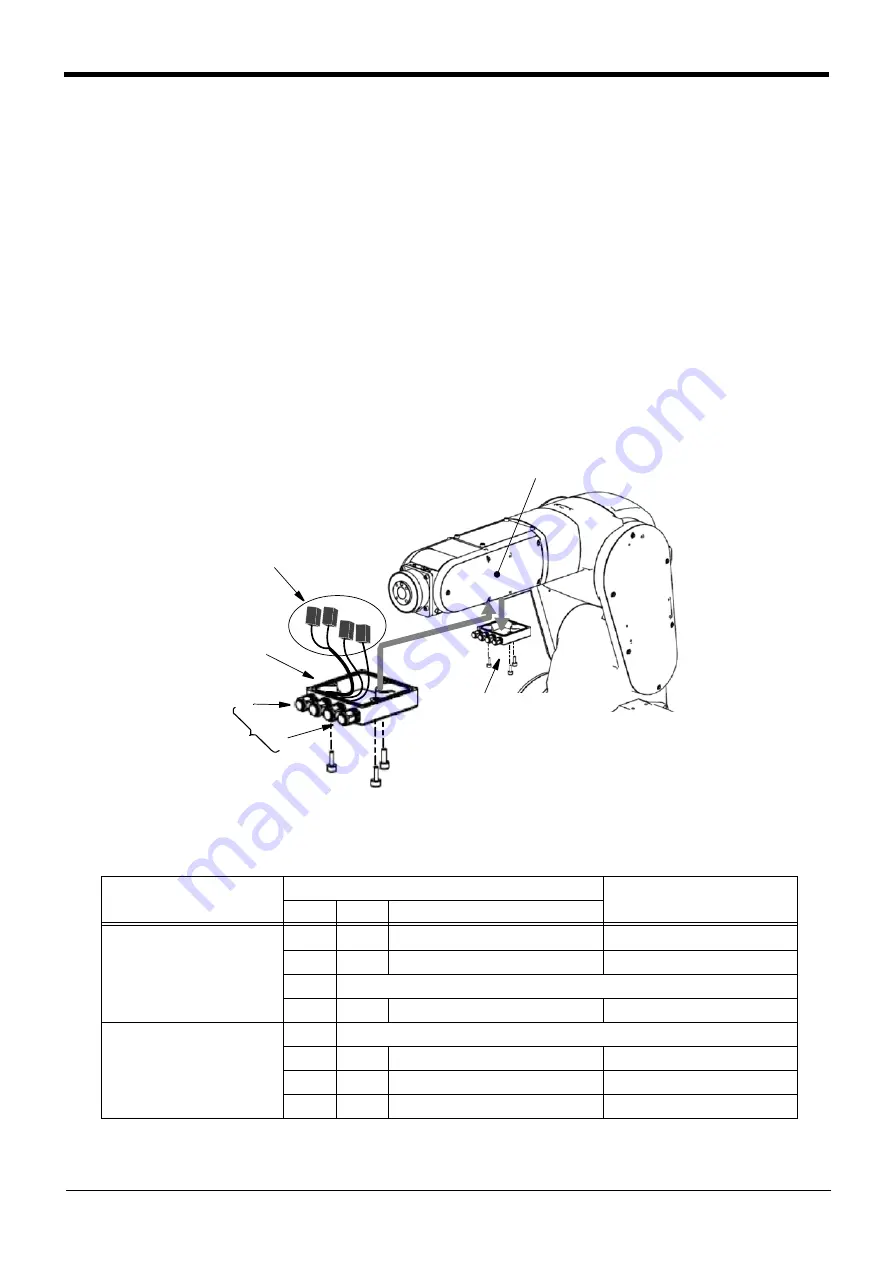
(1) Installing the Forearm external wiring set
The installation summary of the Forearm external wiring set is shown in
. Mounts this option instead of the
removed cable clamp box. For the 6-axis type robot, move the J4 axis in advance to the upside down position by
jog operation to facilitate installation of the cable.
1) Loosen the fixing screws (three M4x16 screws) of cable clamp box (under forearm) and remove the box.
2) Connects the connector of robot arm side inside the forearm to the connector of Forearm external wiring set.
Connect with the same names, and keep it into the forearm. The connector to connect is shown in
.
Fig.3-5 : Installing the Forearm external wiring set
Table 3-10 : Cable to pull out and robot side connection connector
Forearm external wiring set
Cable to pull out
Robot side connection connector
Outlet
Name
Purpose of use
1F-HB01S-02 (For SExx01)
1F-HB01S-01 (For SExx02)
①
HC
Hand input cable
Note1)
Note1) Although the connector is attached to the customer wiring side of the hand input cable, it can use by cutting. Pin
assign of the hand input cable is shown in
OP1, OP3
②
LAN
Vision sensor controller
LAN
③
Reserved
④
E ・ F1
Force sensor
OP4, OP2
1F-HB02S-02 (For SExx01)
1F-HB02S-01 (For SExx02)
①
Reserved
②
LAN
Vision sensor controller
LAN
③
E ・ F1
Reserved
OP1, OP3
④
E ・ F2
Force sensor
OP4, OP2
Connector of robot side
(Connect inside of No.2 arm)
Cable clamp box
Three fixing screws
Connecting connector with the robot
(Refer to
Customer wiring side
Cable outlet
(Refer to
)
①
②
③
④
~
Forearm external
wiring set


































































