





























5 - 64
MELSEC-A
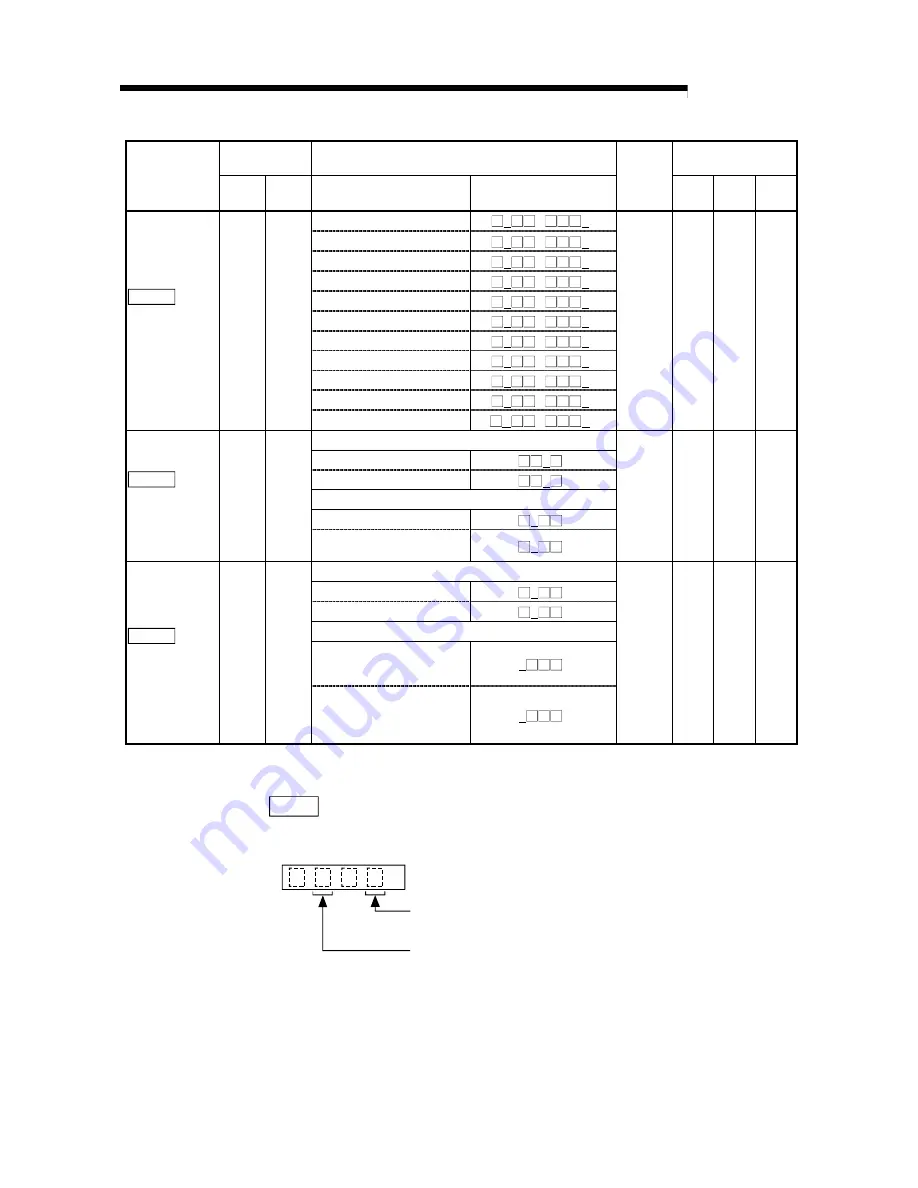
5 DATA USED FOR POSITIONING CONTROL
Servo amplifier
side parameter
Setting value, setting range
Setting value buffer
memory address
Item
No.
Abbre-
viation
Value set with peripheral
device
Value set with sequence
program
Default
value
Axis 1 Axis 2 Axis 3
0 : Servomotor speed
0
H
/
0
H
1 :
Torque
1
H
/
1
H
2 : Servomotor speed (+)
2
H
/
2
H
3 : Torque (+)
3
H
/
3
H
4 : Current command
4
H
/
4
H
5 : Command speed
5
H
/
5
H
6 : Droop pulse 1/1
6
H
/
6
H
7 : Droop pulse 1/4
7
H
/
7
H
8 : Droop pulse 1/16
8
H
/
8
H
9 : Droop pulse 1/32
9
H
/
9
H
Pr.122
Monitor output
mode
selection
No.22 MOD
A : Droop pulse 1/64
A
H
/
A
H
0001
H
122 272 422
Carrier frequency selection
0 : 2.25KHz (Standard)
0
H
3 : 9.0KHz (Low noise)
3
H
Serial encoder cable selection
0 :
2-wire
0
H
Pr.123
Option
function 1
No.23 *OP1
1 : 4-wire (Supports long
distance cables)
1
H
0000
H
123 273 423
Motor-less operation selection
0 :
Invalid
0
H
1 :
Valid
1
H
Solenoid brake interlock output selection
0 : Independent of motor
speed (Output under
specific condition)
0
H
Pr.124
Option
function 2
No.24 *OP2
1 : Output under specific
condition at motor
speed of zero speed or
less
1
H
0000
H
124 274 424
* This parameter is made valid when the servo amplifier is powered OFF, then ON again after it has been transferred
from the AD75 to the servo amplifier.
Pr.122
Monitor output mode selection
Select the signals to be output from the analog monitor CH1 and CH2 of the servo
amplifier.
H
Monitor output 2 selection
Set any of 0 to A. (Refer to the settings of the following monitor output 1)
Monitor output 1 selection
0: Servomotor speed
1: Torque
2: Servomotor speed (+)
3: Torque (+)
4: Current command
5: Command speed
6: Droop pulse 1/1
7: Droop pulse 1/4
8: Droop pulse 1/16
9: Droop pulse 1/32
A: Droop pulse 1/64
0
0
Summary of Contents for A1SD75M1
Page 2: ......
Page 20: ...A 18 MEMO...
Page 22: ...MEMO...
Page 27: ...1 5 MELSEC A 1 PRODUCT OUTLINE MEMO...
Page 42: ...1 20 MELSEC A 1 PRODUCT OUTLINE MEMO...
Page 52: ...2 10 MELSEC A 2 SYSTEM CONFIGURATION MEMO...
Page 111: ...5 21 MELSEC A 5 DATA USED FOR POSITIONING CONTROL MEMO...
Page 115: ...5 25 MELSEC A 5 DATA USED FOR POSITIONING CONTROL MEMO...
Page 123: ...5 33 MELSEC A 5 DATA USED FOR POSITIONING CONTROL MEMO...
Page 127: ...5 37 MELSEC A 5 DATA USED FOR POSITIONING CONTROL MEMO...
Page 167: ...5 77 MELSEC A 5 DATA USED FOR POSITIONING CONTROL MEMO...
Page 193: ...5 103 MELSEC A 5 DATA USED FOR POSITIONING CONTROL MEMO...
Page 276: ...5 186 MELSEC A 5 DATA USED FOR POSITIONING CONTROL MEMO...
Page 332: ...7 18 MELSEC A 7 MEMORY CONFIGURATION AND DATA PROCESS MEMO...
Page 334: ...MEMO...
Page 422: ...9 64 MELSEC A 9 MAIN POSITIONING CONTROL MEMO...
Page 446: ...10 24 MELSEC A 10 ADVANCED POSITIONING CONTROL MEMO...
Page 472: ...11 26 MELSEC A 11 MANUAL CONTROL MEMO...
Page 576: ...12 104 MELSEC A 12 CONTROL AUXILIARY FUNCTIONS MEMO...
Page 745: ......







































































