




























FX Series Positioning Controllers
Program Examples 9
9-19
9.4.3
Circular interpolation (true circle) (FX
2N
-20GM)
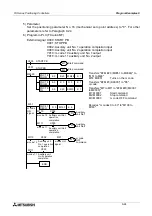
1) Outline of positioning
The machine moves in a true circular route.
2) Operating procedure
c
The machine returns to the zero point by the start command only at the first time.
d
The machine moves to the target address in a linear route.
e
The output Y0 turns on, and the machine moves in a true circular route.
f
The output Y0 turns off, and the machine returns to the zero point address (0, 0).
3) Operation chart
4) Program
5) Parameter
Set the positioning parameter No. 16 (mechanical zero point address) to "0" for both the X
and Y axes. For other parameters, refer to Paragraph 9.2.4.
200
200
(300,200)
X axis
Mechanical
zero point
Y axis
Line No.
Instruction
Description
O0,
N0
LD M9057;
N1
FNC00(CJ) P254;
Jumps to P254 if the zero point return
completion flag M9057 is ON.
N2
cod28(DRVZ);
Returns the machine to the zero point.
(mechanical zero point address = 0, 0)
N3
P254;
N4
cod01(LIN) x300 y200 f1200; Moves the machine to the target address
(300, 200).
N5
SET Y0;
Turns on Y0.
N6
cod04(TMR) K150;
Sets the operation wait time to "1.5 sec".
N7
cod02(CW) i200 j200 f1200;
Sets a true circular route because the end
coordinates (target position) are not specified.
The center coordinates (i, j) are always treated
as an incremental address.
If the radius (r) is specified, a true circular route
cannot be realized.
N8
RST Y0;
Turns off Y0.
N9
cod04(TMR) K150;
Sets the OFF wait time to "1.5 sec".
N10
cod01(LIN) x0 y0 f1200;
Moves the machine to the zero point in a linear
route.
N11
m02(END);
Summary of Contents for FX2N-10GM
Page 1: ...HARDWARE PROGRAMMING MANUAL FX2N 10GM FX2N 20GM ...
Page 4: ...FX Series Positioning Controllers ii ...
Page 6: ...FX Series Positioning Controllers iv ...
Page 46: ...FX Series Positioning Controllers Introduction 1 1 34 MEMO ...
Page 76: ...FX Series Positioning Controllers Wiring 3 3 24 MEMO ...
Page 222: ...FX Series Positioning Controllers Operation Maintenance and Inspection 8 8 18 MEMO ...
Page 256: ...FX Series Positioning Controllers Program Examples 9 9 34 MEMO ...







































































