




















5-98
Resetting the origin
5 Maintenance and Inspection
5.6.4 User origin method
Before using this method, the origin must be set with the other method.
The setting method is explained in
Page 81, "Table 5-7 : Origin setting method"
The procedure for setting the origin with the user origin method is explained below.
This operation is carried out with the teaching pendant. Set the [MODE] switch on the front of the controller to
"AMNUAL", and set the [ENABLE] switch on the teaching pendant to "ENABLE" to enable the teaching pendant.
The operation method is shown below.
When setting the origin for the first time using this method, carry out the operations in order from step 1). For the
second and following time, move the robot arm to the user origin position with jog operation, and accurately posi
-
tion all axes. Then start the procedure from step 4).
1) Determine the user origin position
Move the robot to the position to be set as the origin with jog operation. Refer to
for details on the jog operation.
Choose the user origin position as the position where it doesn't move by the gravity.
This position is left as a guideline to position all axes with jog operation when setting
the origin again with this method.
2) Enter the JOINT jog mode, and display the joint coordinates on the teaching pendant screen. Record the
value of the axis for which the origin is to be set.
3) Input the value recorded in the "user designated origin parameter (USRORG)".
The parameter details and input methods are described in the separate "Instruction Manual/Detailed Explana
-
tion of Functions and Operations". Refer to that manual and input the user designated origin position.
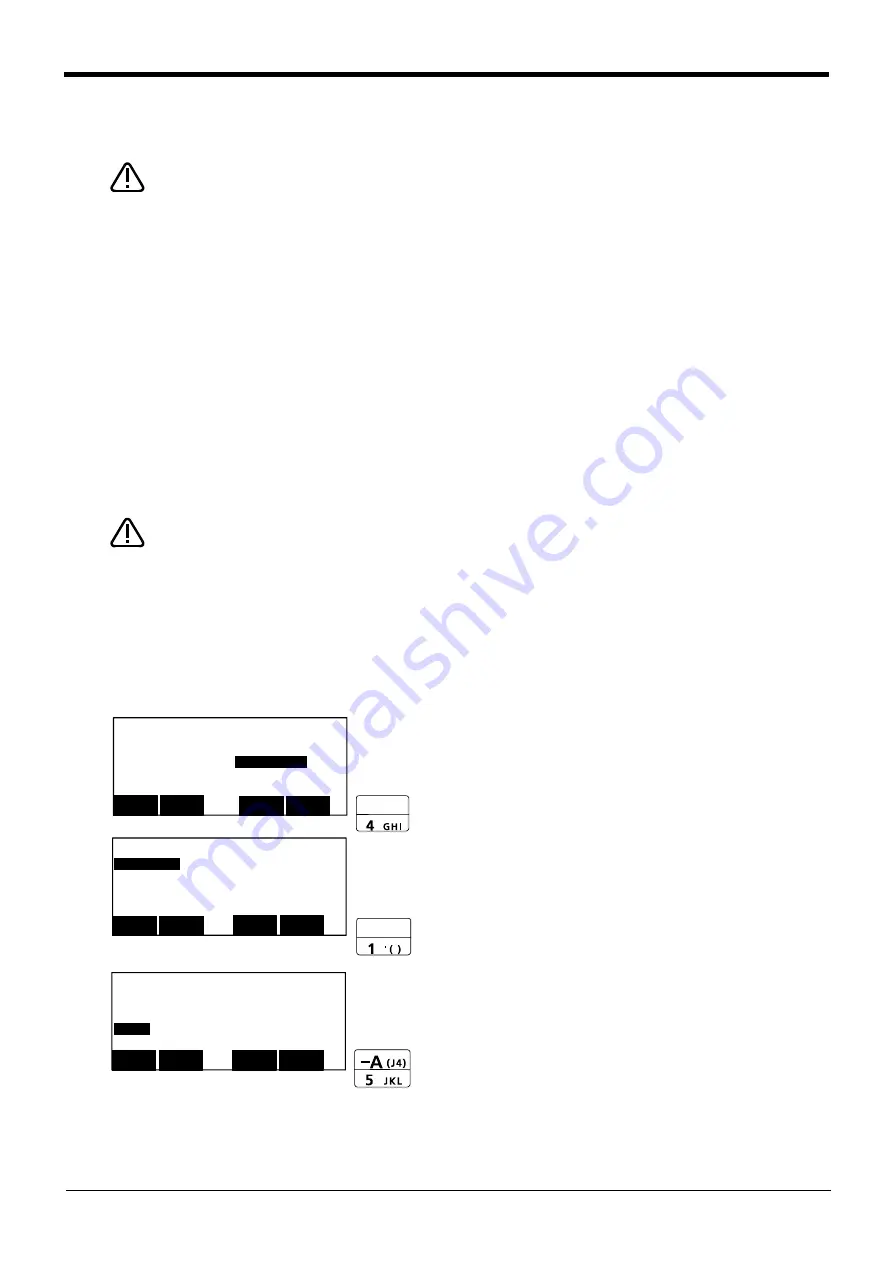
4) Next, set the origin.
Display the menu screen.
5) Press the [4] key on the menu screen, and dis
-
play the Origin/Break selection screen.
6) Press the [1] key, and display the Origin setting
selection screen.
7) Press the [5] key, and display the User selection
screen.
CAUTION
CAUTION
<ORIGIN>
1.DATA 2.MECH
3.TOOL 4.ABS
5.USER
CLOSE
123
<MENU>
1.FILE/EDIT 2.RUN
3.PARAM.
4.ORIGIN/BRK
5.SET/INIT. 6.ENHANCED
CLOSE
123
<ORIGIN/BRAKE>
1.ORIGIN
2.BRAKE
CLOSE
123







































































