























2-38
Confirming the operation
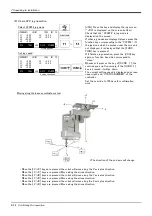
(6) Work jog operation
Setting of the work coordinates system is necessary.
By this jog operation, robot can be move along with the direction of work (or working table etc.), so teaching
operations get easier.
When jog operation, select by which work coordinates the robot moves
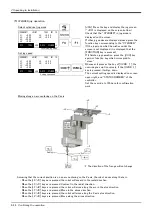
The setting method of the work coordinates system using T/B (R32TB) is shown in the following.
(Parameter: Setting the coordinate value to WKnCORD ("n" is meaning the number (1-8) of work
coordinates) can also set up the work coordinates system. Refer to the separate manual "Detailed
Explanation of Functions and Operations" for details of parameter.)
In addition, this jog operation is available at the following software versions. The below-mentioned
"6.ENHANCED" menu is not displayed in the other versions.
T/B :Ver.1.3 or later
SQ series: N8 or later
SD series :P8 or later
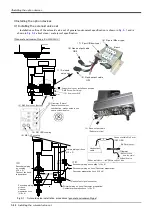
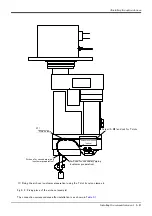
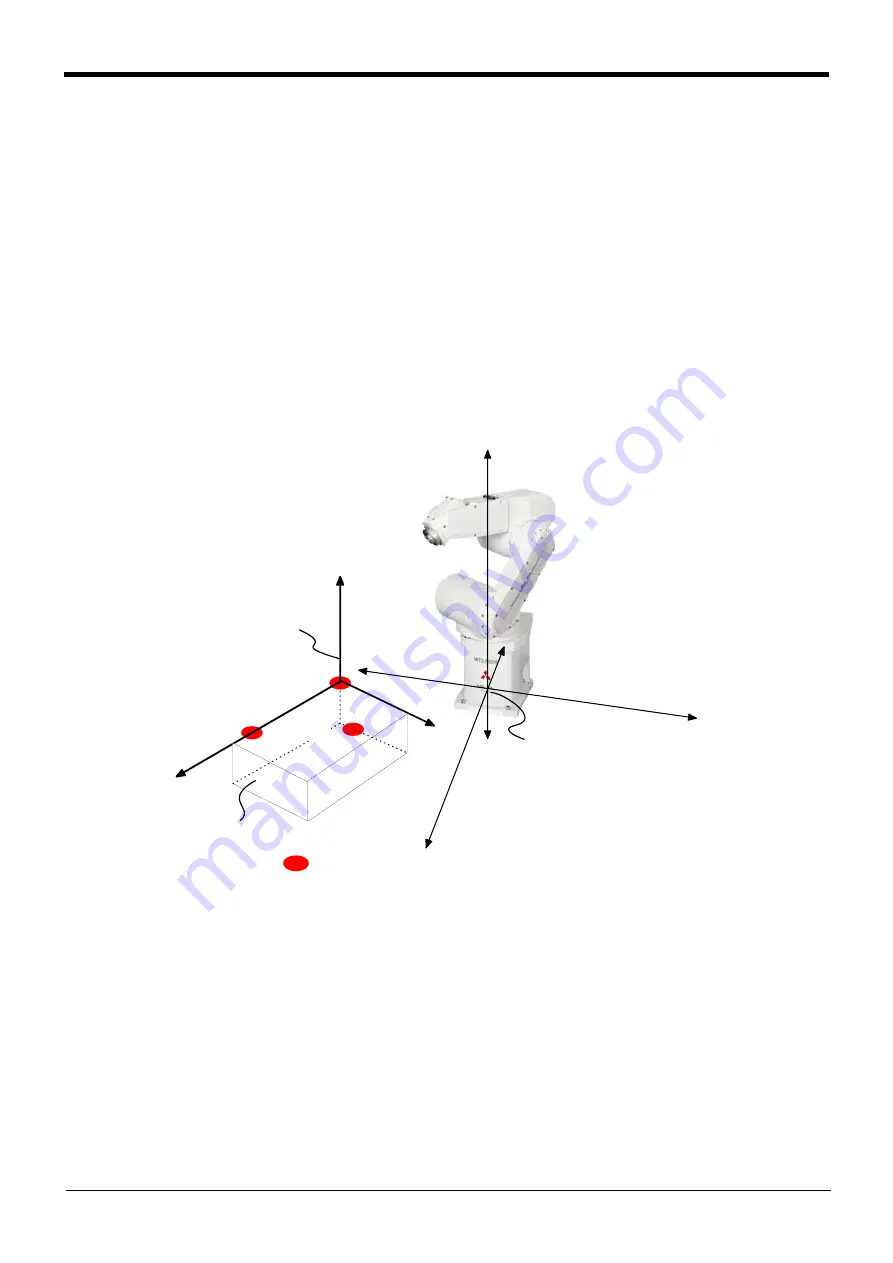
The work coordinates system teaches and sets up the three points (WO, WX, WY).
Fig.2-18 : Setting of the work coordinates system (teaching point)
The setting (definition) method of the work coordinates system is shown in the following.
+Zw
+Xw
+Yw
+Z
+Y
+X
< Teaching point>
WO: Work coordinates system origin
WX: Position on the "+X" axis of work coordinates system.
WY: Position at the side of "+Y" axis on the X-Y plane of work coordinates system
Robot coordinates
system
Work
WY
WO
WX
work coordinates
Notes) The figure is the example of
RV-6SD, but other types are
the same
The jogging movement
based on this work is
possible.
[Supplement] : The coordinate values which use all three teaching points for setting of the
work coordinates system are each only X, Y, and the Z-axis. Although the coor-
dinate value of A, B, and C axis is not used, positioning will get easy if the XYZ
jog or TOOL jog movement is effected with the same value. (The direction of the
hand is the same)







































































