























Confirming the operation
2-39
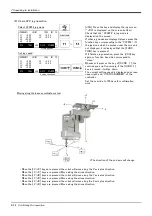
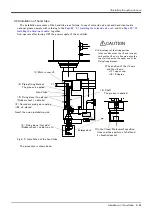
1) Select "6.ENHANCED" screen on the <MENU> screen.
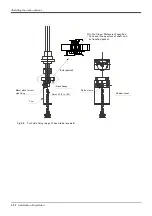
2) Press the [2] keys in the menu screen and select "2. WORK COORD."
3) Selection of the work coordinates number
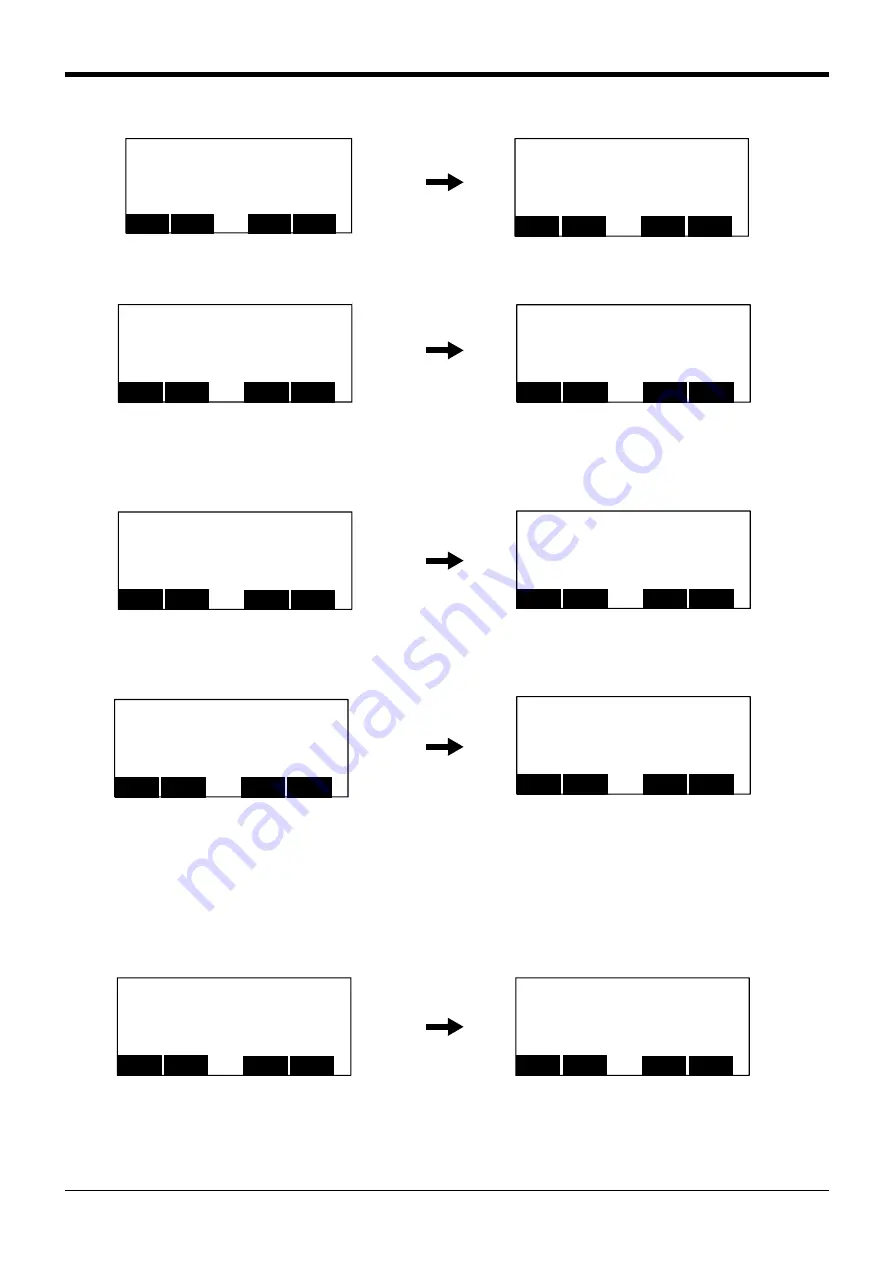
Press the [FUNCTION] keys, and display "W: JUMP" function. Press the function key corresponding to
"W: JUMP"
Press numeral key [1] - [8] and specify the work coordinates number. The coordinate value of the specified
work coordinates system is displayed.
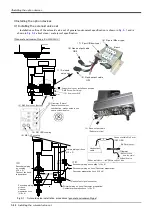
4) The teaching of the work coordinates system
Teach the three points shown in
. Confirm the name currently displayed on the "TEACHING
POINT" at the upper right of the screen. If it differs, press the function key corresponding to each
point(WO, WX, WY) to teach. Move the robot's arm by jog operation (other jogging movement), and press
the function key corresponding to "TEACH."([F1]) The confirmation screen is displayed.
<MENU>
1.FILE/EDIT 2.RUN
3.PARAM. 4.ORIGIN/BRK
5.SET/INIT. 6.ENHANCED
CLOSE
123
<EMHANCED>
1.SQ DIRECT 2.WORK COORD.
CLOSE
123
The screen shows the coordinate value of the origin
(WO) of the work coordinates number 1.
<EMHANCED>
1.SQ DIRECT 2.WORK COORD.
CLOSE
123
<WORK COORD> WORK NUMBER (1)
TEACHING POINT (WO)
X: 0.00
Y: 0.00
Z: 0.00
123
TEACH
WX
WY
DEFINE
<WORK COORD> WORK NUMBER (1)
TEACHING POINT (WO)
X: 0.00
Y: 0.00
Z: 0.00
123
W.JUMP W.GRID
CLOSE
<WORK JUMP>
CHOOSE ONE OF THE WORK NUMBER
1-8.
123
CLOSE
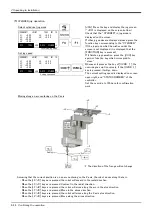
The screen is the example which specified
the work coordinates number 2. ("2" at the
upper right of the screen)
Operation will be canceled if the
[CLOSE] key is pressed.
<WORK JUMP>
CHOOSE ONE OF THE WORK NUMBER
1-8.
123
CLOSE
<WORK COORD> WORK NUMBER (2)
TEACHING POINT (WO)
X: 0.00
Y: 0.00
Z: 0.00
123
W.JUMP W.GRID
CLOSE
<WORK COORD> WORK NUMBER (2)
TEACHING POINT (WO)
X: 0.00
Y: 0.00
Z: 0.00
123
TEACH
WX
WY
DEFINE
Specify the teaching point [WO],[WX],[WY]
teaching the position [TEACH]
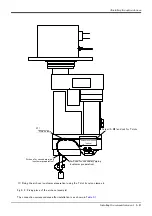
<WORK COORD> WORK NUMBER (2)
TEACHING POINT (WO)
RECORD CURRENT POSITION.
OK?
123
Yes
No



































































