
























3Installing the option devices
Installing the hand input cable
3-53
3.3 Installing the hand input cable
The installation procedure of the hand input cable is as follows. In use of solenoid valve set and hand tube
optional, please operate with referring to the
Page 44, "3.1 Installing the solenoid valve set"
together.
And, operate after turning OFF the power supply of the controller.
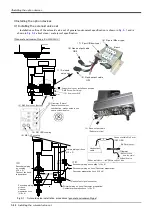
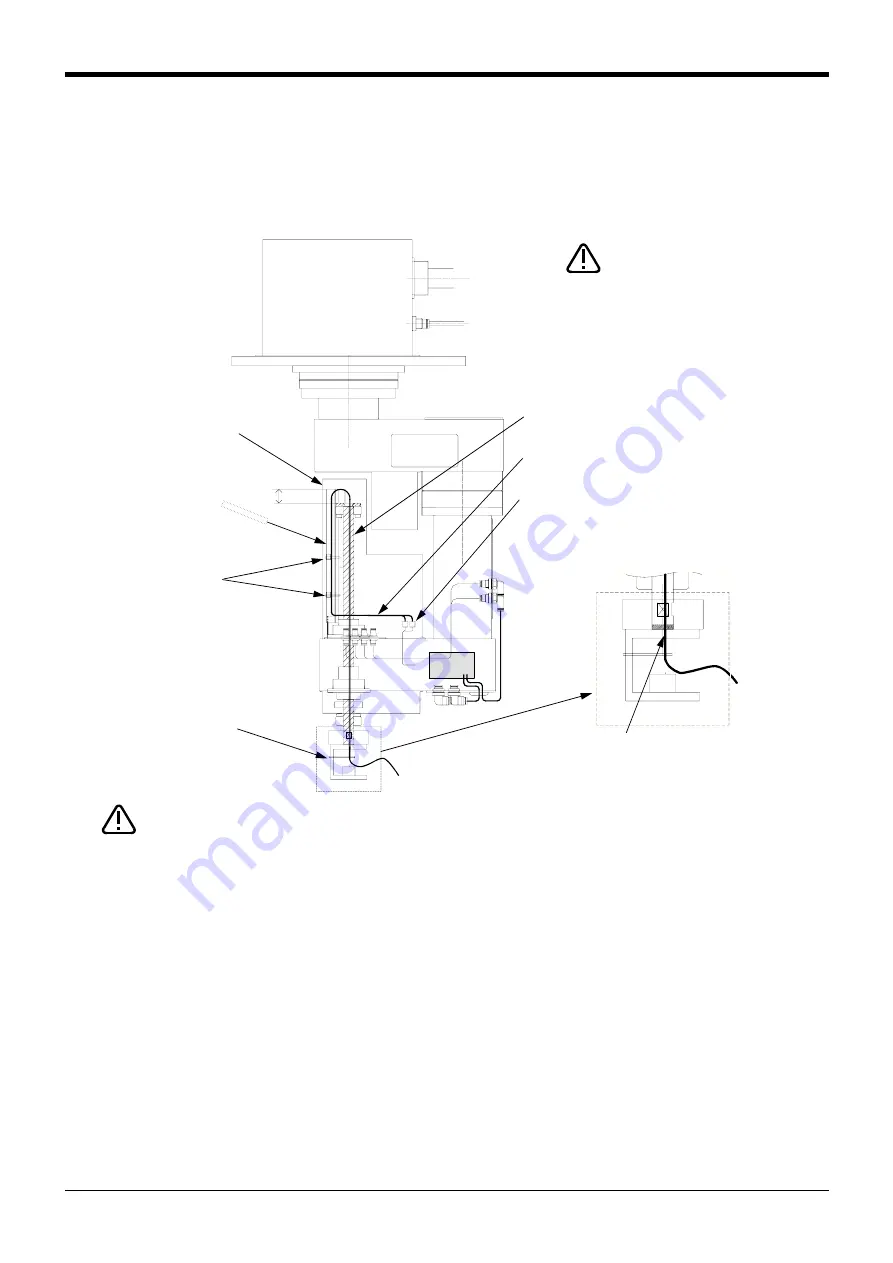
Fig.3-9 : Installation of the hand input cable
1) To protect the fixing place of the hand input cable, roll the attached rubber sheet. Roll the rubber sheet with
referring to
Page 50, "Fig.3-6 : Protection of hand tube and hand input cable"
. If using the hand tube, roll
together.
2) Remove motor cover J3 <1> with referring to the
Page 66, "5.3.2 Installing/removing the cover"
3) By jog operation, set the J3 axis to the upper end, and set the J4 axis to the 0 degree. This position is
adjustment basis for fixing hand input cable.
4) The hand input cable connector <2> is fixed at J4 motor inside the motor cover J3 <1> with cable tie. Once
cut the cable tie and connect the hand input cable optional connector. Connect the same connector names.
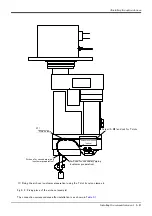
5) Fixing the connector to the J4 motor by cable tie (attachments) as before.
Note : Fixing the connector at flat surface on the J4 motor, to make the connector parallel to the motor cover
J3 <1>.
6) Pass through the hand input cable into the shaft <4> along the piping fixing bracket <3>.
7) Fixing the hand input cable to the piping fixing bracket <3> with cable tie. (two places <5> attachment) . Fixing
the cable from top of the rubber sheet that rolled before so that the cable may not slide.
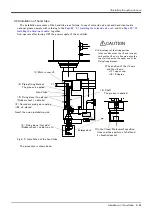
*1) Adjustment of the fixing position
In the condition that the J3 axis is upper
limit and the J4 axis is 0 degree, align the
top of air tube (hand input cable) with the
upper end of the Piping fixing bracket.
CAUTION
<1> Motor cover J3
Hand input cable
*1
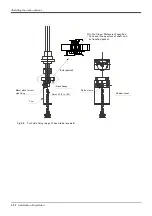
<3> Piping fixing bracket
The grease is applied.
<4> Shaft
The grease is applied.
<2> Hand input cable connector
Fixing by cable tie
Fixing after connection as before.
*The position of the J3
axis and the J4 axis
J3 = upper end
J4 = 0 degree
<5> Fixing place
(two places)
(Rubber sheet + cable tie)
<6> Fixing place (tool side)
(Rubber sheet + cable tie, etc)
If this cable is connected to the robot, the power supply will be applied to the cable
terminal. The end of the cable is free at the time of shipment.
Therefore, if it is not still connecting, the trouble may occur by the short circuit. (The fuse breaks etc.)
When you connect to the robot, confirm the cable is disposed properly in the customer in advance.
CAUTION
*On the Clean/ Waterproof specifica
-
tions seal the aperture of shaft end
by liquefied gasket.
Enlargement
































































