

























3-54
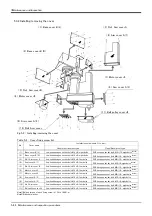
Installing the hand input cable
3Installing the option devices
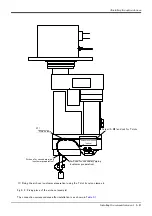
8) Align the top of hand input cable with the upper end of the piping fixing bracket <3> by the drawer side at the
end of the shaft.
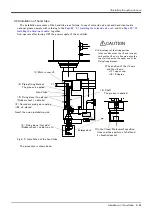
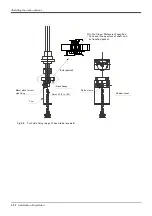
9) At the tool side of customer preparation should roll the rubber sheet (attachments) in the same way, and fix it
by cable tie etc (attachments) with maintaining this adjustment position. Fixing like the fixing method shown in
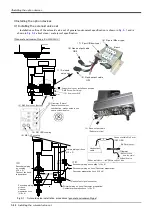
10) Install motor cover J3 <1> securely as before. The grease is applied to hand input cable contact places,
such as the inside of the shaft. Please wipe off the grease adhering to the hand input cable.
The installation of the hand input cable is completion above.
Fixing the hand input cable securely. If fixing is not securely, the cable will bend during
robot movement and it will become the cause of breaking down.
CAUTION







































































