




























5 Maintenance and Inspection
Resetting the origin
5-89
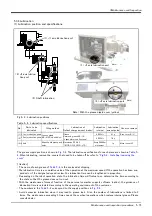
(4) All axis origin setting
1) Refer to the paragraphs from
Page 82, "(1) J1 axis origin setting(mechanical stopper)"
and J4 axis origin setting (mechanical stopper)"
above for the description of how to adjust the origins of the
J1 to J4 axes. Line up the ABS marks for the J4 axis and move the other axes into contact with the
mechanical stoppers. At this point, the robot will have the posture shown below
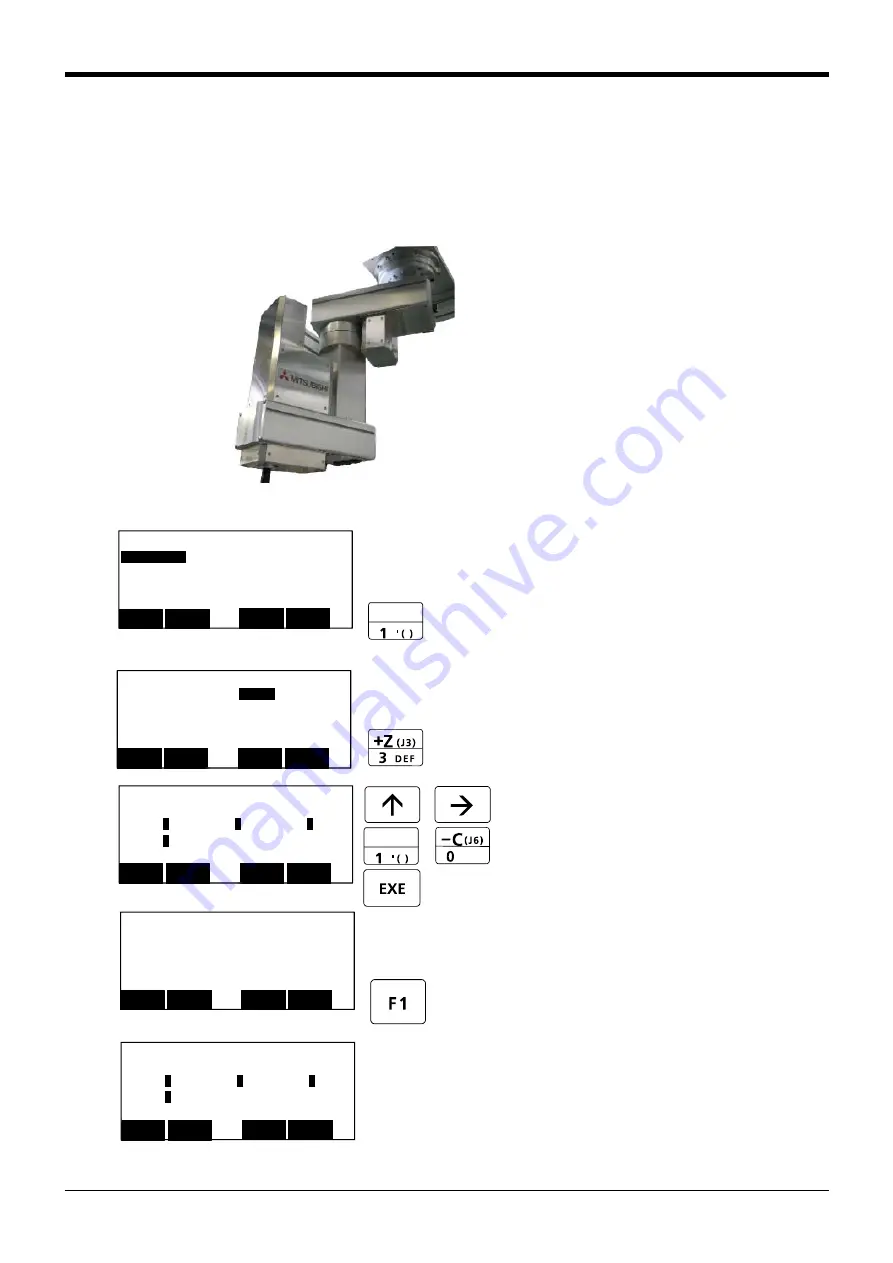
2) Press the [1] key, and display the Origin set
-
ting selection screen.
3) Press the [2] key, and display the Mechanical
stopper selection screen.
4) Input "1" into the J1 to J4 axis. Set "0" to
other axes.
5) Press the [EXE] key, and display Confirmation
screen.
6) Press the [F1] key, and the origin position is
set up.
7) Setting of the origin is completed.
8) Refer to
Page 100, "5.6.5 Recording the origin
in this manual, and record the origin data
on the origin data seal.
SPACE
<ORIGIN/BRAKE>
1.ORIGIN
2.BRAKE
CLOSE
123
<ORIGIN> MECH
J1(
1
) J2(
1
) J3(
1
)
J4(
1
) J5( ) J6( )
J7( ) J8( )
CLOSE
123
<ORIGIN> MECH
CHANGE TO ORIGIN. OK?
No
123
Yes
<ORIGIN> MECH COMPLETED
J1(
1
) J2(
1
) J3(
1
)
J4(
1
) J5( ) J6( )
J7( ) J8( )
CLOSE
123
<ORIGIN>
1.DATA
2.MECH
3.TOOL 4.ABS
5.USER
CLOSE
123

































































