



























2Unpacking to Installation
Setting the origin
2-19
2.4.2 Setting the origin with the origin data input method
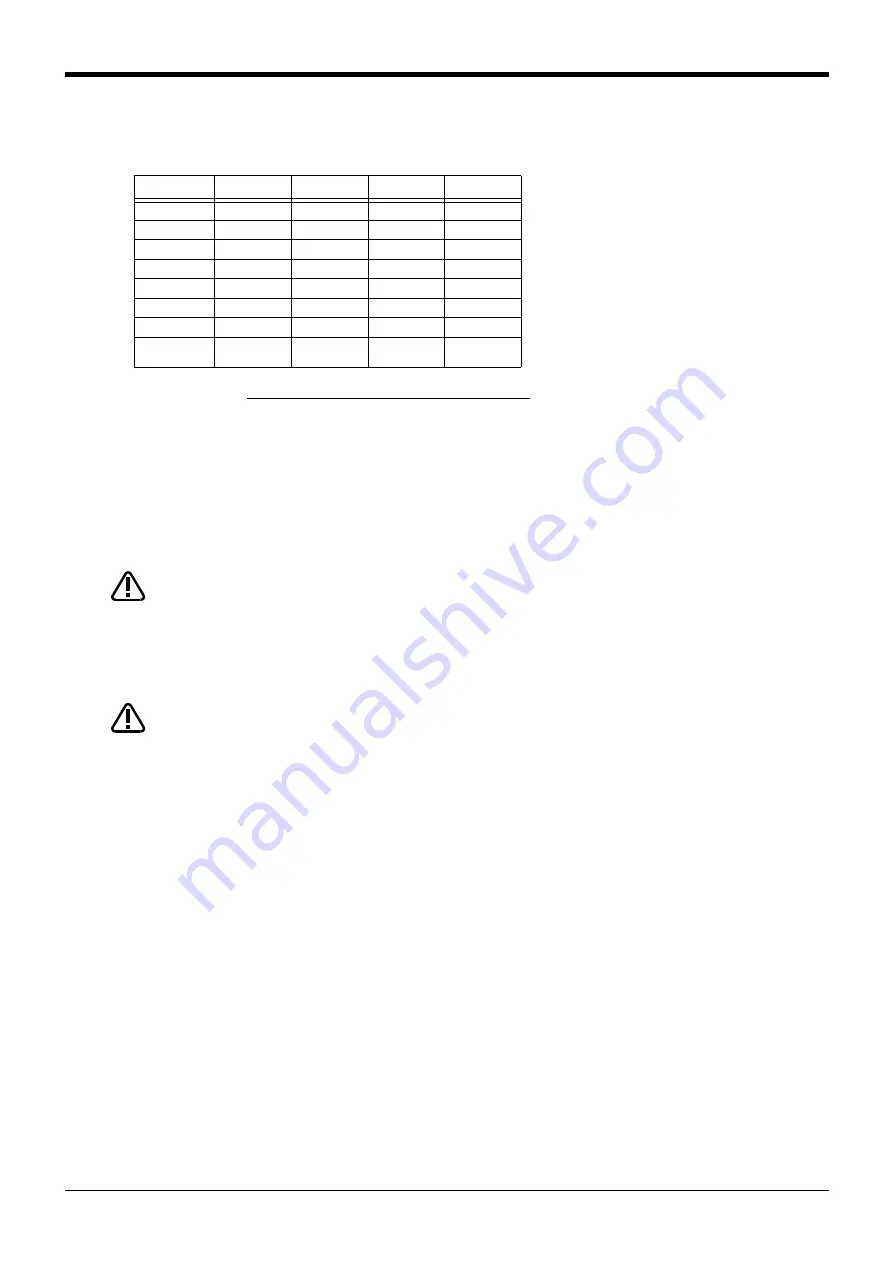
(1) Confirming the origin data
The origin data to be input is noted in the
origin data sheet enclosed with the arm,
or on the origin data history table
attached to the back side of the base
cover B(L). (Refer to
).
Referring to
, remove the base
cover B(L) and confirm the value.
The value given in the default setting
column is the origin settings set with the
calibration jig before shipment.
Fig.2-10 : Origin data label (an example)
* The origin data to input is found on also the robot examination report sheet.
Always install/remove the cover with the controller control power turned OFF.
Failure to do so could lead to physical damage or personal injury should the robot
start moving due to incorrect operations.
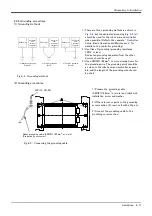
(2) Turning ON the control power
Confirm that there are no operators near the robot before turning the power ON.
1) Turn the controller [POWER] switch ON.
The control power will be turned ON, and "o. 100" will appear on the STATUS NUMBER display on the
front of the controller.
● Origin data history table (Origin Data History) Serial No.ES804008
(O: O(Alphabet), 0: Zero)
Note) Meanings of symbols in method column
E: Jig method
N: Not used
SP: Not used
Date
Default
. . .
. . .
. . .
D
V!#S29
J 1
06DTYY
J 2
2?HL9X
J 3
1CP55V
J 4
T6!M$Y
J 5
Z2IJ%Z
J 6
A12%Z0
Method
E
E ・ N ・ S P
E ・ N ・
S P
E ・ N ・ S P
WARNING
CAUTION






































































