























3-48
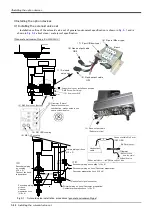
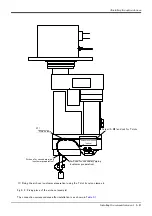
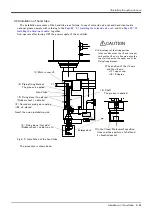
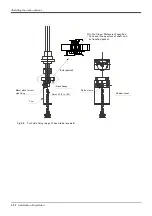
Installing the solenoid valve set
3Installing the option devices
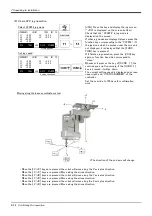
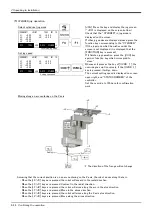
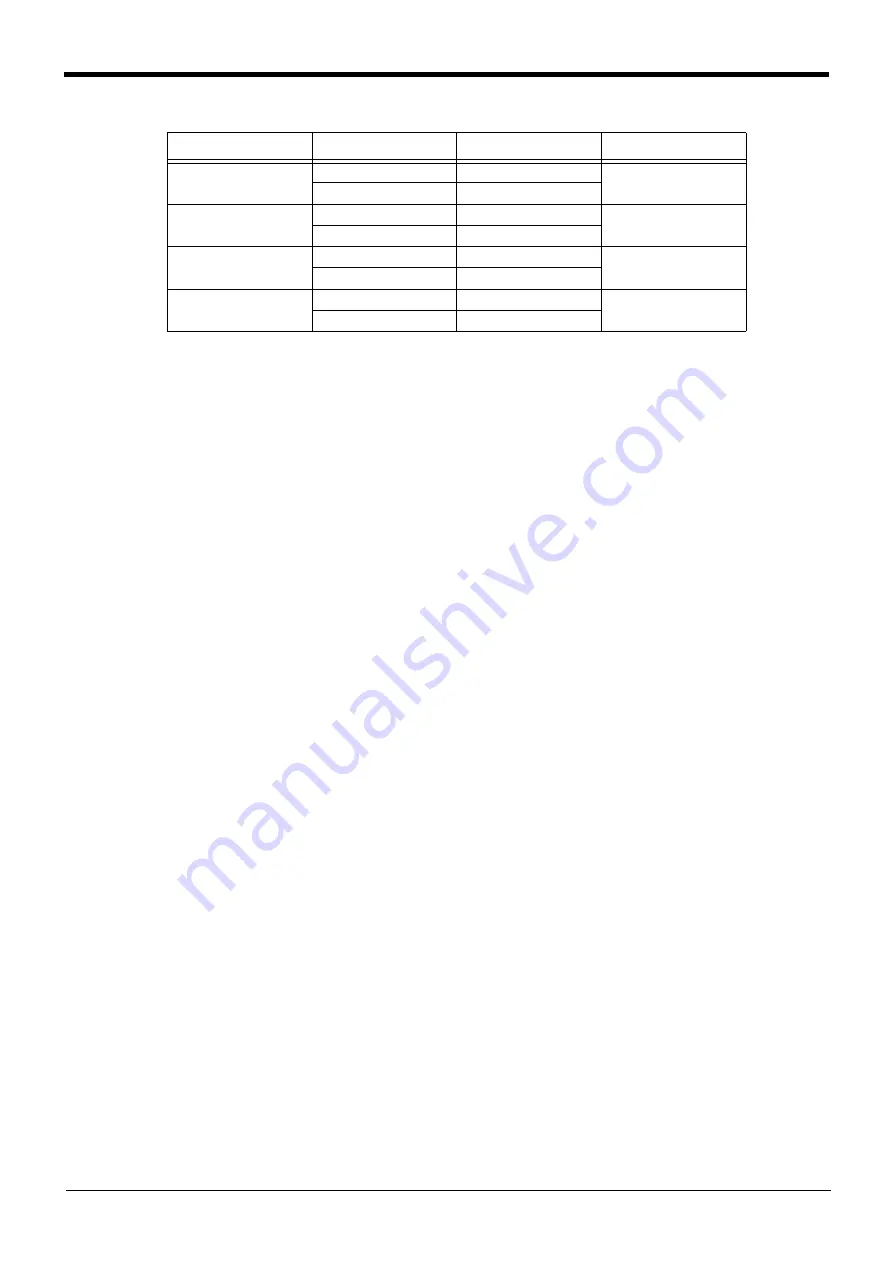
Table 3-1 : Solenoid valve ports and hoses: Correspondence of couplings and hand ports
Hand
Hand port
Solenoid valve port
Solenoid valve used
Hand
1
OPEN
1
1 st row
CLOSE
2
Hand
2
OPEN
3
2 nd row
CLOSE
4
Hand
3
OPEN
5
3 rd row
CLOSE
6
Hand
4
OPEN
7
4 th row
CLOSE
8







































































