






















3Controller
Standard specifications
3-34
3 Controller
3.1 Standard specifications
3.1.1 Standard specifications
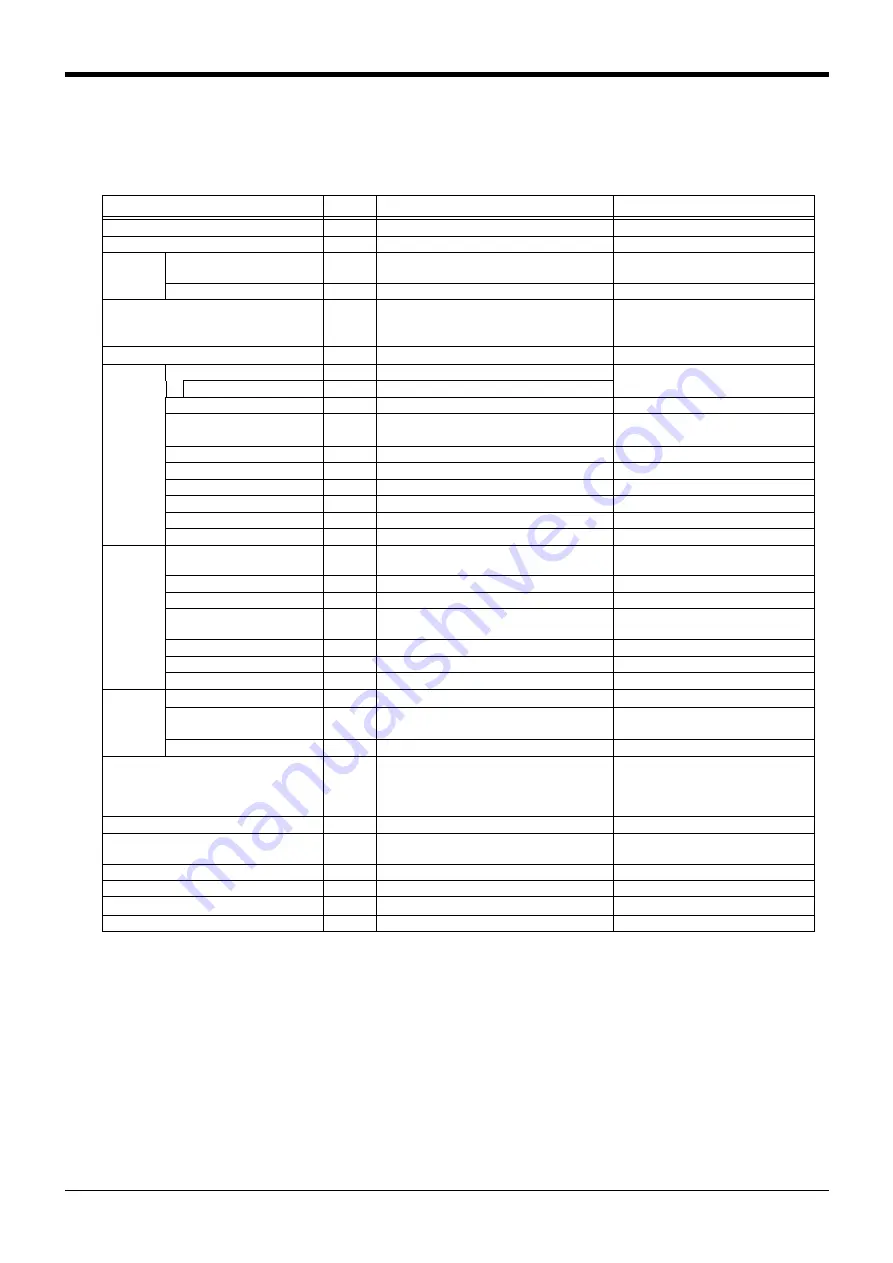
Table 3-1 : Specifications of controller (CR1DA-700 series)
Item
Unit
Specification
Remarks
Type
CR1DA-771
Number of control axis
Simultaneously 6(Maximum)
Memory
capacity
Programmed positions and No.
of steps
point
step
13,000
26,000
Number of programs
256
Robot language
MELFA-BASIC V
or
MELFA-BASIC IV
Note1)
Note1) The program of MELFA-BASIC IV can be used by MELFA-BASIC V, if program is converted by RT ToolBox2 (option).
Teaching method
Pose teaching method ,MDI method
Note2)
Note2) Pose teaching method: The method to register the current position of the robot arm.
MDI method: The method to register by inputting the numerical value Immediate.
External
input and
output
input and output
point
0/0
Max. 256/256 by option
Dedicated input/output
Assigned with general-purpose input/output
Special stop input
point
1
Hand open/close input/output
point
Input 4 point/Output 0 point
Up to 4 output points can be added as
an option
Note3)
Note3) It is when an pneumatic hand interface (2A-RZ365/2A-RZ375) is installed.
Emergency stop input
point
1
Dual line, normal close
Door switch input
point
1
Dual line, normal close
Enabling device input
point
1
Dual line, normal close
Mode output
point
1
Dual line
Robot error output
point
1
Dual line
Addition axis synchronization
point
1
Dual line
Interface RS-232C
port
1
For expansion such as the personal
cpmputer, Vision sensor
Ethernet
port
1: For T/B, 1: For customers
10BASE-T/100BASE-Tx
USB
port
1
Ver. 2.0 Only device function
Hand dedicated slot
slot
1
Dedicated for pneumatic hand inter
-
face
Additional axis interface
Channel
1
SSCNET Ⅲ
Tracking interface
Channel
1
For encoder cable connection
Option slot
slot
1
For optional interface installation
Power
source
Input voltage range
V
1-phase, AC180 to 253
Note4)
Note4) Please use the controller with an input power supply voltage fluctuation rate of 10% or less.
Power capacity
KVA
0.5
Does not include rush current
Note5)
Note5) The power capacity (0.5kVA) is the rating value for normal operation. The power capacity does not include the rush
current when the power is turned ON. The power capacity is a guideline and the actual operation is affected by the input
power voltage. The power consumption in the specific operation pattern with the RV-2SD is approx. 0.33kW. The short
circuit breaker should use the following.
*Operate by the current leakage under the commercial frequency domain (50-60Hz). If sensitive to the high frequency
ingredient, it will become the cause in which below the maximum leak current value carries out the trip.
Power supply frequency
Hz
50/60
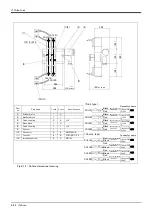
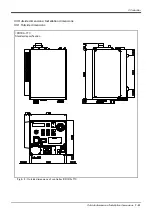
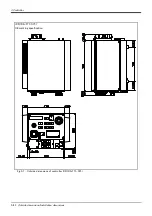
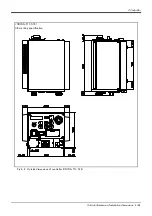
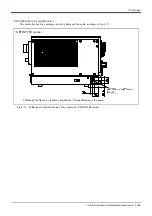
Outline dimensions
Note6)
Note6) Refer to
Page 42, "3.3 Outside dimensions/Installation dimensions"
for details.
mm
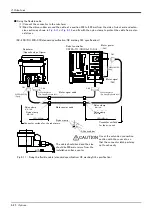
CR1DA-700 (Standard specification):
240(W)x290(D)x200(H)
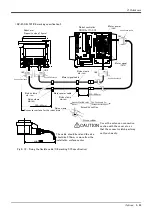
CR1DA-700 (CE marking specification) :
270(W)x290(D)x200(H)
Excluding protrusions
Mass
kg
Approx. 9
Construction
Self-contained floor type
Opened type (IP20)
IP20
Operating temperature range
℃
0 to 40
Ambient humidity
%RH
45 to 85
Without dew drops
Grounding
Ω
100 or less
D class grounding earth
Note7)
Note7) The robot must be grounded by the customer.
Paint color
Light gray
Munsell 0.08GY7.64/0.81
Summary of Contents for MELFA RV-2SD Series
Page 2: ......
Page 122: ......
Page 123: ......
Page 124: ......
Page 125: ......
Page 126: ......
Page 127: ......
Page 128: ......
Page 129: ......
Page 130: ......
Page 131: ......
Page 132: ......
Page 133: ......
Page 134: ......
Page 135: ......
Page 136: ......
Page 137: ......
Page 138: ......
Page 139: ......
Page 140: ......
Page 141: ......
Page 142: ......
Page 143: ......
Page 144: ......
Page 145: ......
Page 146: ......
Page 147: ......
Page 148: ......
Page 149: ......







































































