























2 Robot arm
Options
2-30
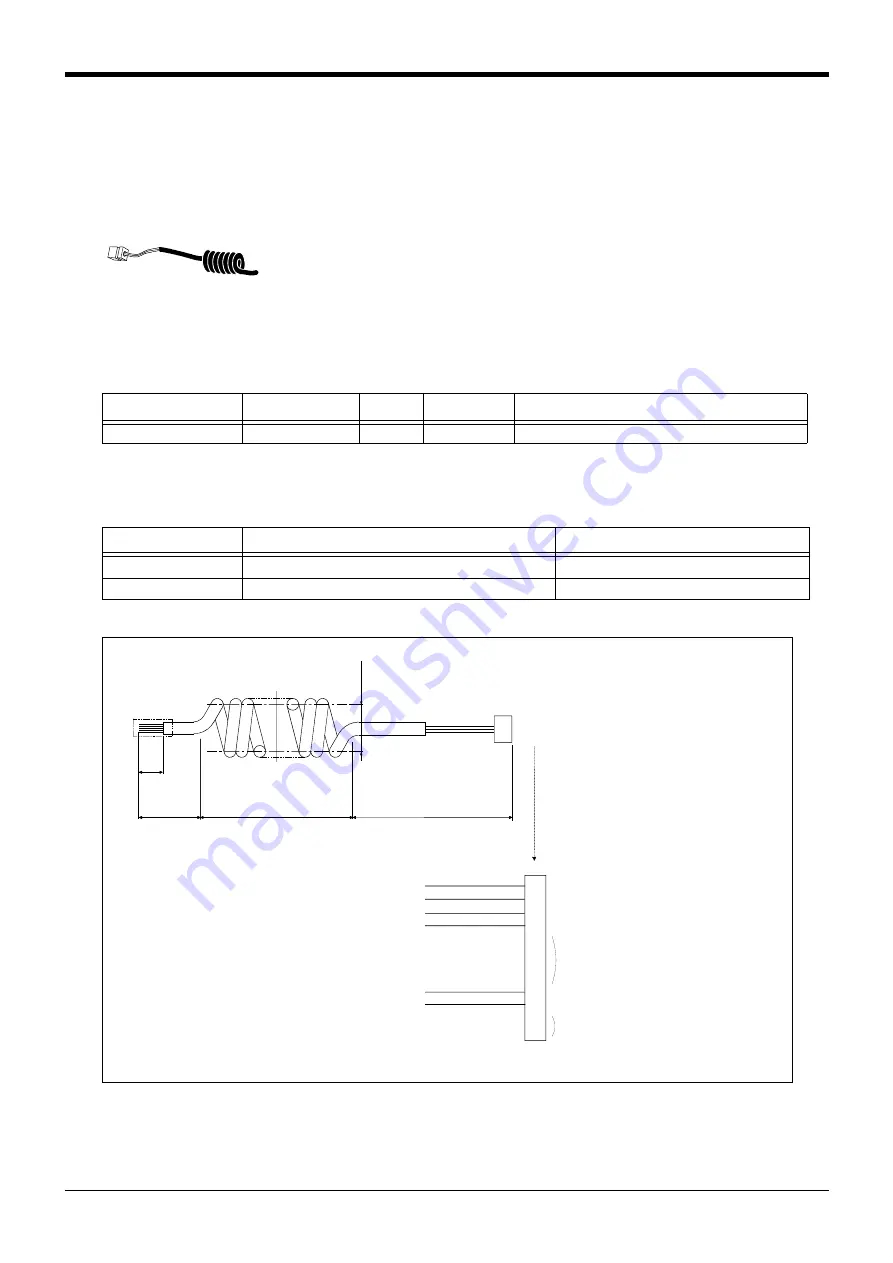
(4) Hand input cable
■ Order type: 1S-HC30C-11
■ Outline
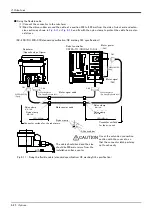
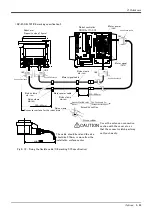
The hand input cable is used for customer-designed pneumatic hands.
It is necessary to use this to receive the hand's open/close confirmation signals and
grasping confirmation signals, at the controller.
One end of the cable connects to the connector for hand input signals, which is in
the wrist section of the hand. The other end of the cable connects to the sensor
inside the hand customer designed.
■ Configuration
Table 2-14 : Configuration equipment
■ Specifications
Table 2-15 : Specifications
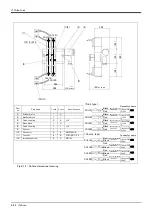
Fig.2-14 : Outside dimensional drawing and pin assignment
Part name
Type
Qty.
Mass(kg)
Note1)
Note1) Mass indicates one set.
Remarks
Hand input cable
1S-HC30C-11
1 cable
0.2
Item
Specifications
Remarks
Size x cable core
AWG#24 (0.2mm
2
)×12
One-sided connector, one-sided cable bridging
Total length
370mm (Including the curl section)
15
200
300
200±10
φ2
5
予約
(黄)キ
(紫)ムラサキ
(茶)チャ
(青)アオ
(黒)クロ
<
CON1H
>
HC
A1
A2
A3
A4
A5
A6
B1
B2
B3
B4
B5
B6
HC1 ハンド入力1
HC2 ハンド入力2
HC3 ハンド入力3
HC4 ハンド入力4
+24V
0V(COM)
予約
1-1827864-6
(緑)ミドリ
(Purple)
(Brown)
(Blue)
(Black)
(Yellow)
(Green)
Reserve
Reserve
HC1
HC2
HC3
HC4
+24V
0V(COM)
* Pin assignment of sink and source is the same.
Summary of Contents for MELFA RV-2SD Series
Page 2: ......
Page 122: ......
Page 123: ......
Page 124: ......
Page 125: ......
Page 126: ......
Page 127: ......
Page 128: ......
Page 129: ......
Page 130: ......
Page 131: ......
Page 132: ......
Page 133: ......
Page 134: ......
Page 135: ......
Page 136: ......
Page 137: ......
Page 138: ......
Page 139: ......
Page 140: ......
Page 141: ......
Page 142: ......
Page 143: ......
Page 144: ......
Page 145: ......
Page 146: ......
Page 147: ......
Page 148: ......
Page 149: ......







































































