





























1 - 2
1. FUNCTIONS AND CONFIGURATION
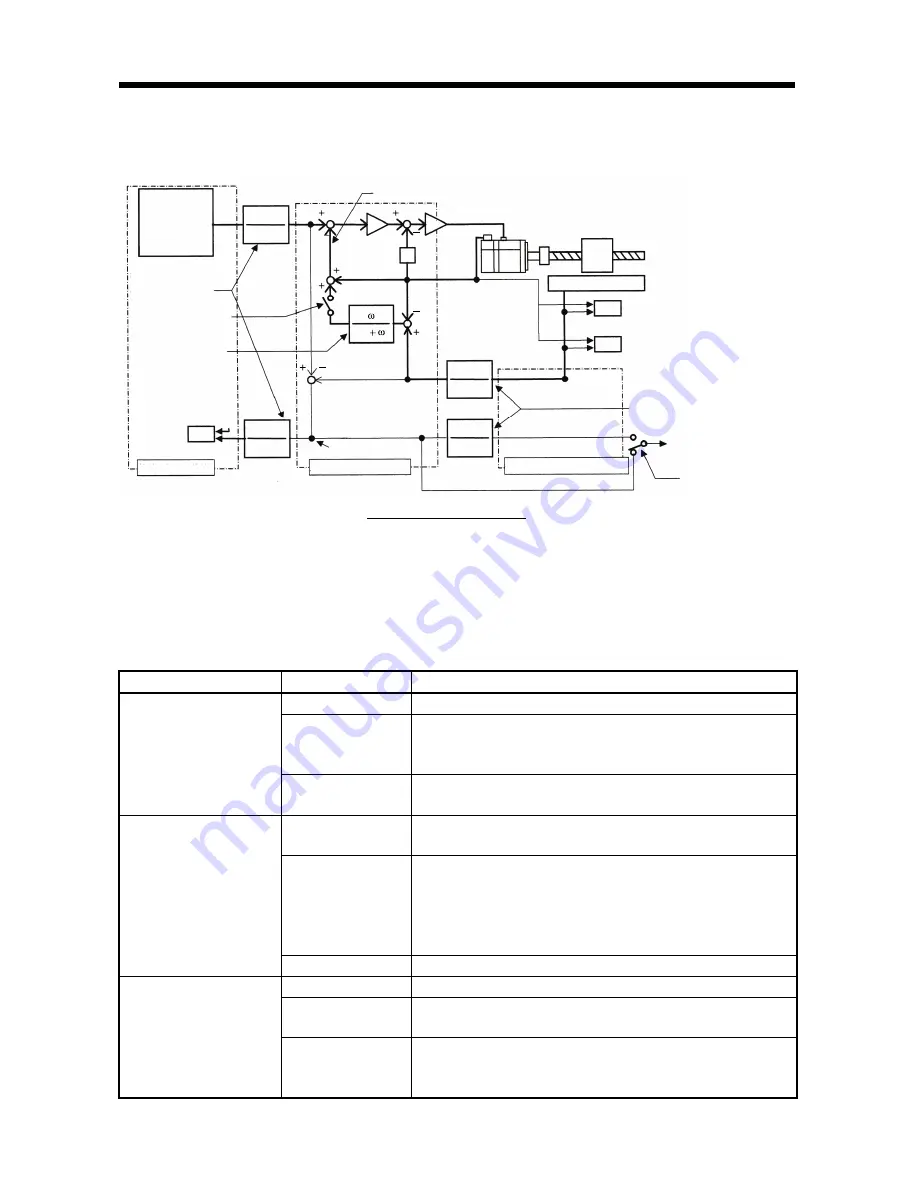
1.2 Control block diagram
A full closed control block diagram is shown below.
Controller
Command pulse
train electronic gear
Parameter No. 6
Full closed selection
Parameter No. 62
(Note 1, 2)
Dual F/B filter
Parameter No. 67
(Note 2)
In-position judgment
INP
Command pulse unit
1
CMX
CMX
1
S
Dual f/b position signal
Position deviation
Encoder pulse unit
FCM
FCD
FCD
FCM
Servo motor
Linear scale
OP9
FCT
Closed end pulse unit
ABZ phase pulse
output selection
Parameter No. 68
Full closed control error
detection function selection
Parameter No. 62, 63, 64
Full closed electronic gear
Parameter No. 65, 66
Droop pulses (MR Configurator
display, analog monitor)
Droop pulse unit
selection
Parameter No. 68
Full closed control block diagram
S
Note 1. Switching between semi closed control and full closed control can be performed by changing the setting of parameter No. 62.
When semi closed control is selected, control is always performed on the basis of the position data of the motor end encoder
(independently of whether the motor is at a stop or running).
2. When parameter No. 62 "full closed function" is valid, dual F/B control in which the motor F/B signal and full closed encoder F/B
signal are combined by the dual F/B filter in parameter No. 67 is performed.
In this case, full closed control is performed when the motor is at a stop, and semi closed control is performed when the motor
is operating to improve control performance. When 1000 is set as the filter value of parameter No. 67, full closed control is
always performed.
Control Mode
Item
Description
Feature
Position is controlled according to the motor end data.
Advantage
Since this control is insusceptible to machine influence (such as
machine resonance), the gains of the servo amplifier can be
raised and the settling time shortened.
Semi closed control
Disadvantage
If the motor end is at a stop, the machine end may be vibrating
or the machine end accuracy not obtained.
Feature
Position is controlled according to the motor end data and
machine end data.
Advantage
Control is performed according to the motor end data during
operation, and according to the machine end data at a stop in
sequence to raise the gains during operation and shorten the
settling time.
A stop is made with the machine end accuracy.
Dual F/B control
Disadvantage
No specific disadvantage.
Feature
Position is controlled according to the machine end data.
Advantage
The machine end accuracy is obtained not only at a stop but also
during operation.
Full closed control
Disadvantage
Since this control is susceptible to machine influence (such as
machine resonance), the gains of the servo amplifier do not rise
and the settling time increases.
Summary of Contents for Melservo-J2-SUPER series
Page 19: ...1 6 1 FUNCTIONS AND CONFIGURATION MEMO...
Page 49: ...2 30 2 LINEAR SCALES MEMO...
Page 85: ...5 8 5 PARAMETERS MEMO...







































































