





























1 - 4
1. FUNCTIONS AND CONFIGURATION
1.5 System configuration
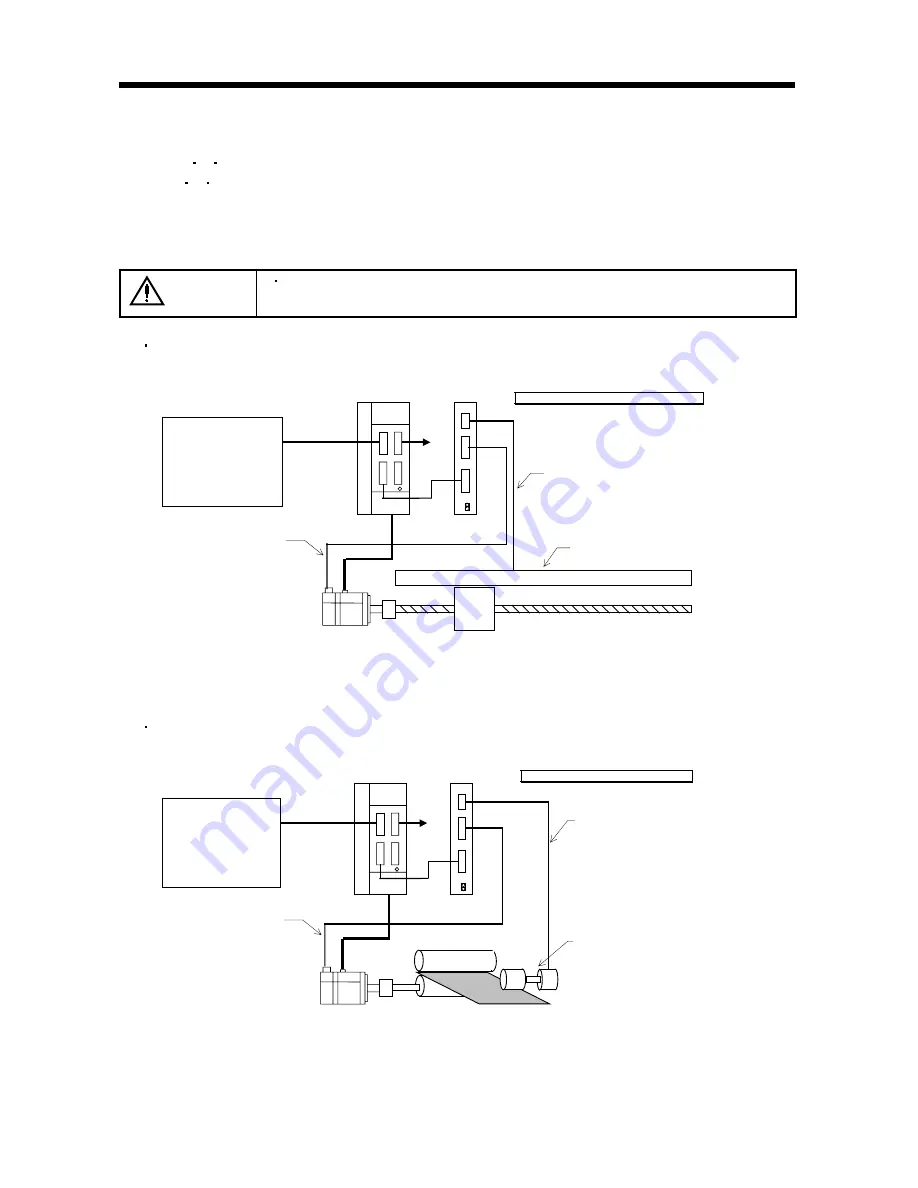
(1) When A B Z differential input interface unit (MR-J2S-CLP01) is used
The A B Z differential input interface unit (MR-J2S-CLP01) converts external ABZ phase pulses
into a position feedback signal that can be used for serial communication.
Full closed control is enabled by connecting the output of the MR-J2S-CLP01 to the servo amplifier
encoder connector.
CAUTION
When the MR-J2S-CLP01 is used, a linear scale without Z phase cannot be
connected. Use a linear scale that has the Z phase.
System configuration example 1 (when ABZ pulse train-specified linear scale is used)
SSCNET controller
Servo amplifier
Position
command
control signal
CN1A
CN1B
CN2
CN2
SSCNET
Encoder signal
Linear scale
A, B, Z phase output (ALM output)
ABZ differential input I/F unit
Servo motor
To other
axis
General-purpose pulse output linear scale
MR-J2S-CLP01
Note 1. A linear scale without Z phase cannot be connected.
2. No compatibility with an absolute position detection system.
System configuration example 2 (when ABZ phase pulse train-specified rotary encoder is used)
SSCNET controller
Servo amplifier
Position
command
control signal
CN1A
CN1B
CN2
CN2
SSCNET
Encoder signal
Rotary encoder
A, B, Z phase output
(ALM output)
ABZ differential input I/F unit
Servo motor
To other
axis
General-purpose pulse output encoder
MR-J2S-CLP01
Note 1. A rotary without Z phase cannot be connected.
2. No compatibility with an absolute position detection system.
3. In this example, full closed control cannot be performed if there is no stock (work).
Summary of Contents for Melservo-J2-SUPER series
Page 19: ...1 6 1 FUNCTIONS AND CONFIGURATION MEMO...
Page 49: ...2 30 2 LINEAR SCALES MEMO...
Page 85: ...5 8 5 PARAMETERS MEMO...







































































