





























4 - 12
4. OPERATION AND FUNCTIONS
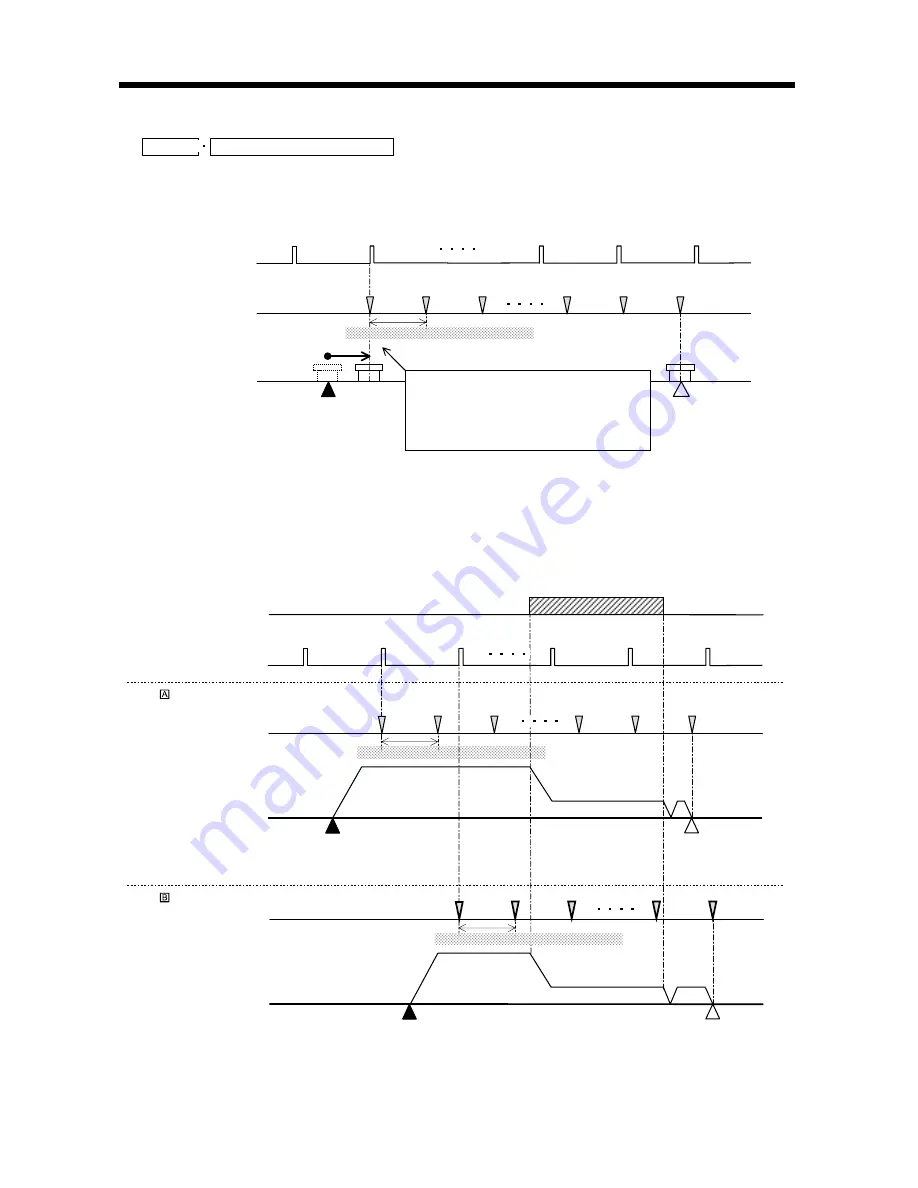
(3) About proximity dog type home position return using rotary encoder
Serial I/F General-purpose pulse output
The home position using a rotary encoder as a full closed encoder is as described below. It is the
position per motor encoder resolution, starting at the position where the Z phase of the full closed
encoder is passed through first after power-on of the servo amplifier.
[Precautions]
Precautions for passage of Z phase
The home position reference position is set relative to the Z phase position of the full closed encoder
that is passed through first after power-on of the servo amplifier.
In Case A and Case B where the power-on position differs as shown below, the power-on position must
be noted since the axis cannot stop at the same home position return position.
Servo amplifier
power-on position
Machine position
Home position
Home position
reference position
Full closed
encoder Z-
phase signal
ON
OFF
Equivalent to one motor encoder revolution
Home position reference is position per
motor encoder resolution relative to Z-phase
signal of full closed encoder that was passed
through first after power-on of servo
amplifier.
Servo amplifier
power-on position
Home position
return
operation
Home position
Home position
reference
position
Full closed
encoder Z-
phase signal
ON
OFF
Equivalent to one motor encoder revolution
Home position return speed
Creep speed
Proximity dog
signal
ON
OFF
Servo amplifier
power-on position
Home position
return
operation
Home position
Home position
reference
position
Home position
return speed
Creep speed
Equivalent to one motor encoder revolution
Case
Case
Summary of Contents for Melservo-J2-SUPER series
Page 19: ...1 6 1 FUNCTIONS AND CONFIGURATION MEMO...
Page 49: ...2 30 2 LINEAR SCALES MEMO...
Page 85: ...5 8 5 PARAMETERS MEMO...







































































