























5 - 5
5. PARAMETERS
Class No. Abbreviation
Name
Initial Value
Unit
Setting
Range
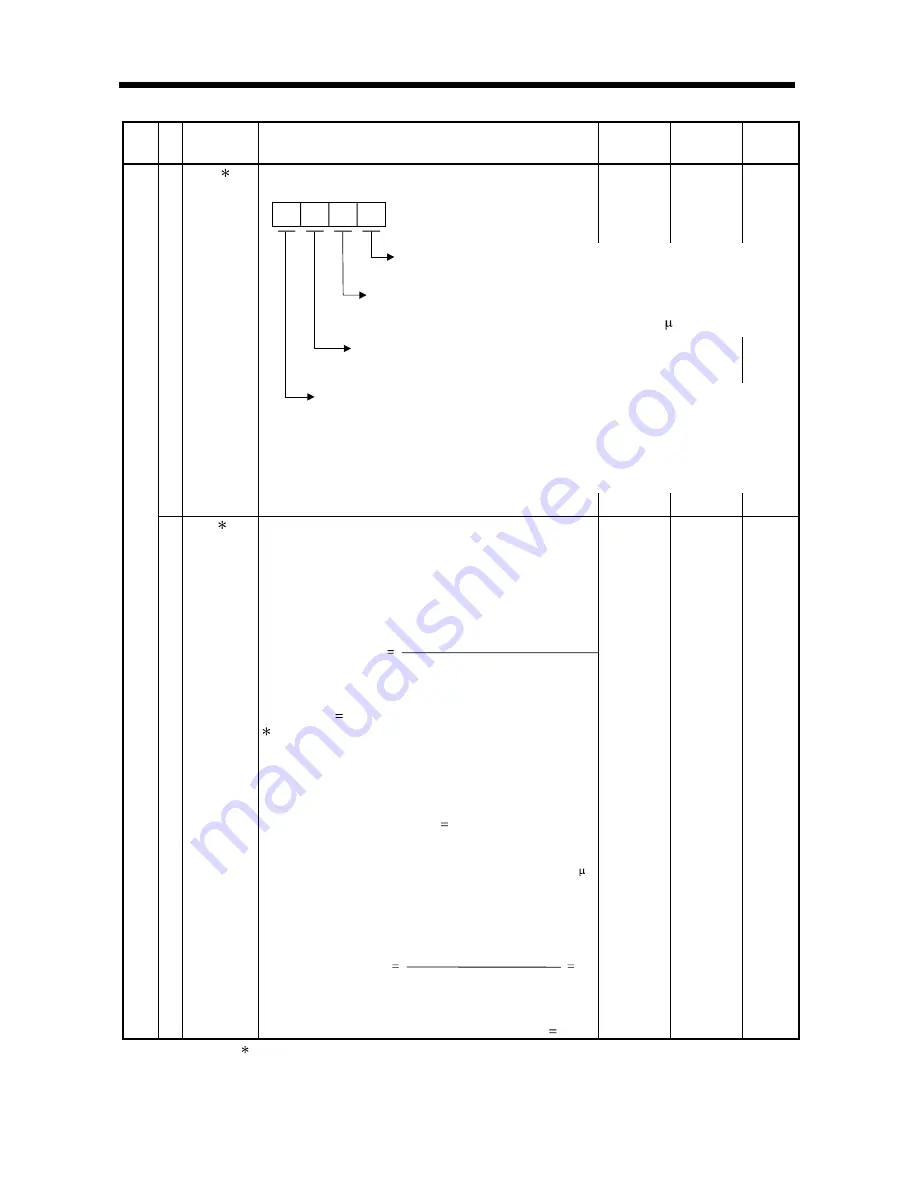
33
OP6 Optional function 6:
Select the optional function 6.
0000
0000h
to
1110h
Ex
pansion p
ar
amet
er
s
38
ENR Encoder output pulse:
Set the encoder output provided by the servo amplifier
in terms of the number of output pulses per revolution
or a division ratio. This selection depends on
parameter No. 33. Use the maximum output frequency
within 1.3Mpulse/sec.
1) In the case of division ratio setting
Number of output pulses
equivalent to one motor
revolution
Number of encoder pulses equivalen
to one motor revolution
ENR setting
2) In the case of output pulse setting
Number of output pulses equivalent to one motor
revolution ENR setting
Set the above number of output pulses in terms of the
number of pulses multiplied by 4 in AB phases.
Note: When the full closed function is made valid in
parameter No. 62 (FCT) and the ABZ-phase pulse
output of the full closed encoder is selected in
parameter No. 68 (FC2), consider it as "equivalent
to one motor revolution" "moving distance of the
full closed encoder equivalent to one revolution of
the semi closed end motor".
For example, when the linear scale of 0.1 m
resolution is installed as the full closed encoder to
move 10mm per servo motor revolution,
1) On the assumption that the ENR setting is 20 for
division ratio setting
Number of output pulses
for 10mm movement
100000 (equivalent to one
motor revolution)
20
500
2) On the assumption that the ENR setting is 20 for
output pulse setting
Number of output pulses for 10mm movement 20
4000
0
to
65535
The parameters marked are valid only at power-on.
Serial communication baud rate selection
0: 9600[bps]
Serial communication response delay time selection
0: Invalid
1: Valid, a replay is sent after a delay time of 888 sec or more
Encoder pulse output setting selection
0: Output pulse setting
1: Division ratio setting
Home position setting condition selection
Select the condition under which a home position setting is made from
the servo system controller.
0: Motor Z-phase pass required after power on
1: Motor Z-phase pass not required after power on
(Used in a data setting type home position return where the Z
phase is not passed through.)
Summary of Contents for Melservo-J2-SUPER series
Page 19: ...1 6 1 FUNCTIONS AND CONFIGURATION MEMO...
Page 49: ...2 30 2 LINEAR SCALES MEMO...
Page 85: ...5 8 5 PARAMETERS MEMO...






































































