





















5 - 7
5. PARAMETERS
Class No. Abbreviation
Name
Initial Value
Unit
Setting
Range
63
BC1 Full closed control error detection 1:
Set the speed difference error detection level of the full
closed control error detection function 1. (Set in terms
of the servo motor end-equivalent speed.)
Whether this function is valid or invalid can be selected
using parameter No. 62 (FCT).
400 r/min
1
to
permissi
ble
speed
64
BC2 Full closed control error detection 2:
Set the position difference error detection level of the
full closed control error detection 2 function. (Set in
terms of the number of servo motor end-equivalent
revolutions.)
Whether this function is valid or invalid can be selected
using parameter No. 62 (FCT).
10 0.1rev
1
to
2000
65
FCM Full closed electronic gear numerator:
Set the numerator of the electronic gear relative to the
full closed encoder pulse.
1
1
to
65535
66
FCD Full closed electronic gear denominator:
Set the denominator of the electronic gear relative to
the full closed encoder pulse.
1
1
to
65535
67
DUF Dual F/B filter:
Set the bandwidth of the dual F/B filter.
At 1000rad/s setting, the full closed control is made
always valid.
At 0rad/s setting, the full closed control is made invalid.
About half of the position loop gain 2 in parameter No.
15 is the guideline of the upper setting limit.
10 rad/s
0
to
1000
Ex
pansion p
ar
amet
er
s 2
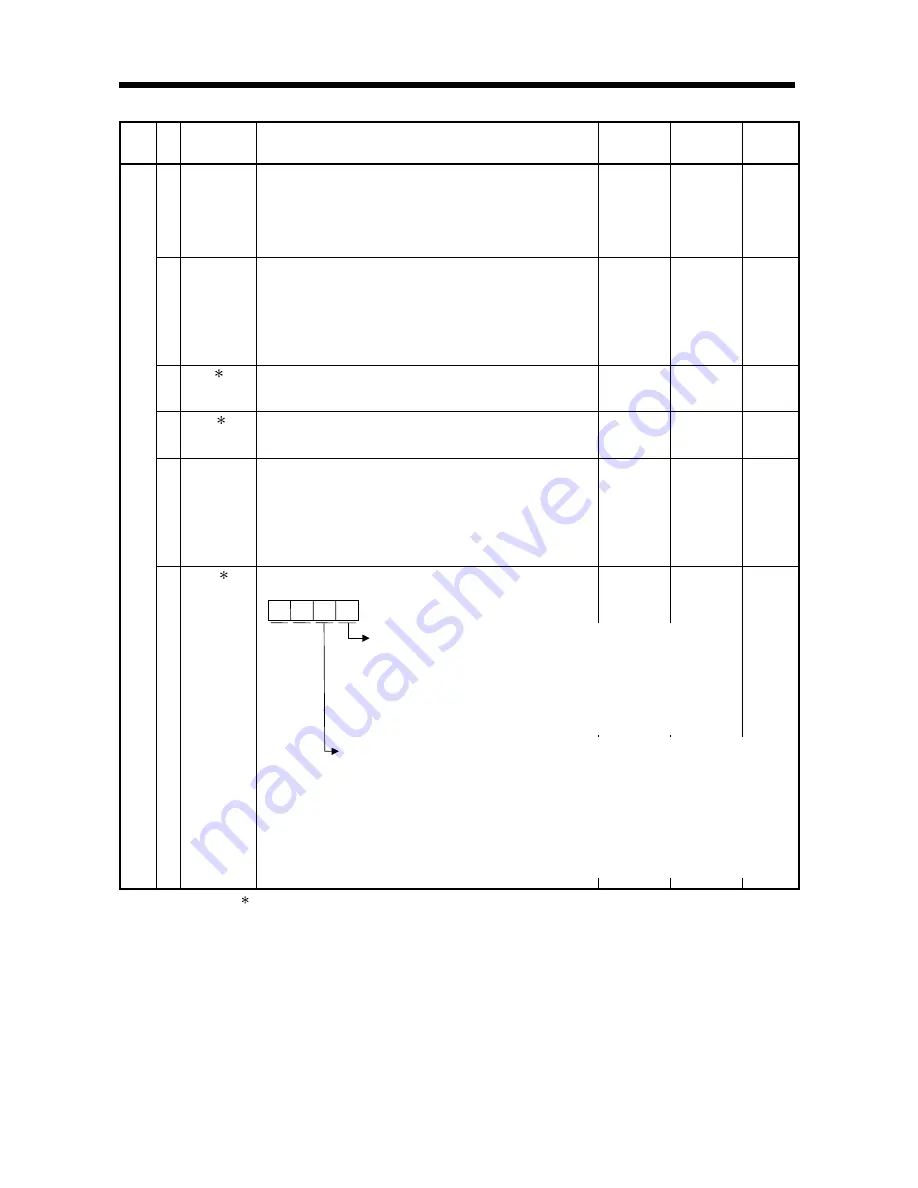
68
FC2 Full closed selection 2:
Select the functions related to full closed control.
0000
0000h
to
0011h
The parameters marked are valid only at power-on.
Droop pulse unit selection
0: Motor end pulse unit
1: Closed end pulse unit
With this setting, the droop pulse unit of the MR Configurator
batch monitor display, monitor graph data and analog monitor
output can be selected.
(Note: When the full closed function is invalid (including when
the semi closed function is selected at the time of the switching
valid setting), the motor end pulse unit is forcibly set.)
Pulse output setting
0: ABZ phase pulses of the full closed encoder are output.
1: ABZ phase pulses of the motor end encoder are output.
(Note: When the full closed function is invalid (including
when the semi closed function is selected at the time of
the switching valid setting), the ABZ phase pulses of the
motor end encoder are forcibly output.)
Summary of Contents for Melservo-J2-SUPER series
Page 19: ...1 6 1 FUNCTIONS AND CONFIGURATION MEMO...
Page 49: ...2 30 2 LINEAR SCALES MEMO...
Page 85: ...5 8 5 PARAMETERS MEMO...







































































