





























5. PARAMETERS
5 - 21
Control
mode
No./symbol/
name
Setting
digit
Function
Initial
value
[unit]
P S T
PA18
*MTY
Servo motor
type setting
When you use a linear servo motor, select its model from [Pr. PA17] and [Pr. PA18].
Set this and [Pr. PA17] at a time.
Refer to the table of [Pr. PA17] for settings.
0000h
Select a reference range and writing range of the parameter.
Refer to table 5.4 for settings.
00AAh
Table 5.4 [Pr. PA19] setting value and reading/writing range
PA19
*BLK
Parameter
writing inhibit
PA19
Setting
operation
PA PB PC PD PE PF PL
Reading
Other
than
below
Writing
Reading
Only
19
000Ah
Writing
Only
19
Reading
000Bh
Writing
Reading
000Ch
Writing
Reading
00AAh
(initial
value)
Writing
Reading
00ABh
Writing
Reading
100Bh
Writing
Only
19
Reading
100Ch
Writing
Only
19
Reading
10AAh
Writing
Only
19
Reading
10ABh
Writing
Only
19
Alarms may not be avoided with the tough drive function depending on the situations of the power supply and load
fluctuation.
You can assign MTTR (During tough drive) to the pins CN1-22 to CN1-25 and CN1-49 with [Pr. PD23] to [Pr. PD26]
and [Pr. PD28].
PA20
*TDS
Tough drive
setting
_ _ _ x For manufacturer setting
0h
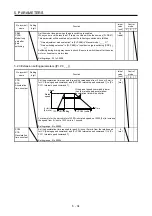
_ _ x _ Vibration tough drive selection
0: Disabled
1: Enabled
Selecting "1" enables to suppress vibrations by automatically changing setting
values of [Pr. PB13 Machine resonance suppression filter 1] and [Pr. PB15 Machine
resonance suppression filter 2] in case that the vibration exceed the value of the
oscillation level set in [Pr. PF23].
To output the oscillation detection alarm as a warning, set [Pr. PF24 Vibration tough
drive function selection].
Refer to section 7.3 for details.
0h
_ x _ _ SEMI-F47 function selection
0: Disabled
1: Enabled
Selecting "1" enables to avoid occurring [AL. 10 Undervoltage] using the electrical
energy charged in the capacitor in case that an instantaneous power failure occurs
during operation. In [Pr. PF25 SEMI-F47 function - Instantaneous power failure
detection time], set the time period until the occurrence of [AL. 10.1 Voltage drop in
the control circuit power].
0h
x _ _ _ For manufacturer setting
0h
Summary of Contents for MR-J4-100A
Page 9: ...A 8 MEMO ...
Page 61: ...1 FUNCTIONS AND CONFIGURATION 1 44 MEMO ...
Page 67: ...2 INSTALLATION 2 6 MEMO ...
Page 137: ...3 SIGNALS AND WIRING 3 70 MEMO ...
Page 261: ...6 NORMAL GAIN ADJUSTMENT 6 24 MEMO ...
Page 291: ...7 SPECIAL ADJUSTMENT FUNCTIONS 7 30 MEMO ...
Page 299: ...8 TROUBLESHOOTING 8 8 MEMO ...
Page 319: ...9 OUTLINE DRAWINGS 9 20 MEMO ...
Page 461: ...12 ABSOLUTE POSITION DETECTION SYSTEM 12 36 MEMO ...
Page 511: ...14 COMMUNICATION FUNCTION 14 38 MEMO ...
Page 559: ...16 USING A DIRECT DRIVE MOTOR 16 20 MEMO ...
Page 583: ...17 FULLY CLOSED LOOP SYSTEM 17 24 MEMO ...
Page 621: ...APPENDIX App 38 ...
Page 639: ......







































































