




























11. OPTIONS AND AUXILIARY EQUIPMENT
11 - 20
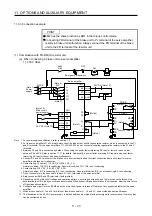
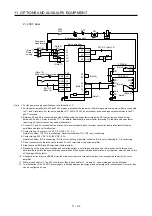
11.3 FR-BU2-(H) Brake unit
POINT
Use a 200 V class brake unit and a resistor unit with a 200 V class servo
amplifier, and a 400 V class brake unit and a resistor unit with a 400 V class
servo amplifier. Combination of different voltage class units cannot be used.
When a brake unit and a resistor unit are installed horizontally or diagonally, the
heat dissipation effect diminishes. Install them on a flat surface vertically.
Temperature of the resistor unit case rises to higher than +100 °C. Keep cables
and flammable materials away from the case.
Ambient temperature condition of the brake unit is between -10 °C to 50 °C.
Note that the condition is different from the ambient temperature condition of the
servo amplifier (between 0 °C and 55 °C).
Configure the circuit to shut down the power-supply with the alarm output of the
brake unit and the resistor unit under abnormal condition.
Use the brake unit with a combination indicated in section 11.3.1.
For executing a continuous regenerative operation, use FR-RC-(H) power
regeneration converter or FR-CV-(H) power regeneration common converter.
Brake unit and regenerative options (Regenerative resistor) cannot be used
simultaneously.
Connect the brake unit to the bus of the servo amplifier. As compared to the MR-RB regenerative option, the
brake unit can return larger power. Use the brake unit when the regenerative option cannot provide sufficient
regenerative capability.
When using the brake unit, set [Pr. PA02] of the servo amplifier to "_ _ 0 1".
When using the brake unit, always refer to the FR-BU2 Instruction Manual.
Summary of Contents for MR-J4-100A
Page 9: ...A 8 MEMO ...
Page 61: ...1 FUNCTIONS AND CONFIGURATION 1 44 MEMO ...
Page 67: ...2 INSTALLATION 2 6 MEMO ...
Page 137: ...3 SIGNALS AND WIRING 3 70 MEMO ...
Page 261: ...6 NORMAL GAIN ADJUSTMENT 6 24 MEMO ...
Page 291: ...7 SPECIAL ADJUSTMENT FUNCTIONS 7 30 MEMO ...
Page 299: ...8 TROUBLESHOOTING 8 8 MEMO ...
Page 319: ...9 OUTLINE DRAWINGS 9 20 MEMO ...
Page 461: ...12 ABSOLUTE POSITION DETECTION SYSTEM 12 36 MEMO ...
Page 511: ...14 COMMUNICATION FUNCTION 14 38 MEMO ...
Page 559: ...16 USING A DIRECT DRIVE MOTOR 16 20 MEMO ...
Page 583: ...17 FULLY CLOSED LOOP SYSTEM 17 24 MEMO ...
Page 621: ...APPENDIX App 38 ...
Page 639: ......






































































