



























14. COMMUNICATION FUNCTION
14 - 17
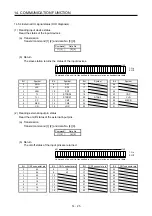
(8) Test operation mode data (command [9] [2], [A] [0])
Command
Data No.
Description
Setting range
Frame length
[0] [0]
Input signal for test operation
Refer to section
14.5.7.
8
[9] [2]
[A] [0]
Forced output of signal pin
Refer to section
14.5.9.
8
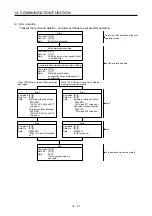
[1] [0]
Writes the servo motor speed in the test operation mode (JOG
operation and positioning operation).
0000 to 7FFF
4
[1] [1]
Writes the acceleration/deceleration time constant in the test
operation mode (JOG operation and positioning operation).
00000000 to
7FFFFFFF
8
[2] [0]
Sets the travel distance in the test operation mode (Positioning
operation).
00000000 to
7FFFFFFF
8
[2] [1]
Selects the positioning direction of test operation (positioning
operation).
0: Forward rotation direction
1: Reverse rotation direction
0: Command pulse unit
1: Encoder pulse unit
0
0
0000 to 0101
4
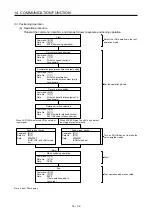
[A] [0]
[4] [0]
This is a start command for test operation (positioning operation).
1EA5
4
[4] [1]
This is used to make a temporary stop during test operation
(positioning operation). " " in the data indicates a blank.
STOP: Temporary stop
GO
□□
: Restart for remaining distance
CLR
□
: Remaining distance clear
STOP
GO
CLR
4
Summary of Contents for MR-J4-100A
Page 9: ...A 8 MEMO ...
Page 61: ...1 FUNCTIONS AND CONFIGURATION 1 44 MEMO ...
Page 67: ...2 INSTALLATION 2 6 MEMO ...
Page 137: ...3 SIGNALS AND WIRING 3 70 MEMO ...
Page 261: ...6 NORMAL GAIN ADJUSTMENT 6 24 MEMO ...
Page 291: ...7 SPECIAL ADJUSTMENT FUNCTIONS 7 30 MEMO ...
Page 299: ...8 TROUBLESHOOTING 8 8 MEMO ...
Page 319: ...9 OUTLINE DRAWINGS 9 20 MEMO ...
Page 461: ...12 ABSOLUTE POSITION DETECTION SYSTEM 12 36 MEMO ...
Page 511: ...14 COMMUNICATION FUNCTION 14 38 MEMO ...
Page 559: ...16 USING A DIRECT DRIVE MOTOR 16 20 MEMO ...
Page 583: ...17 FULLY CLOSED LOOP SYSTEM 17 24 MEMO ...
Page 621: ...APPENDIX App 38 ...
Page 639: ......







































































