



























14. COMMUNICATION FUNCTION
14 - 20
14.5.2 Status display mode
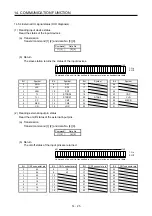
(1) Reading the status display name and unit
Read the status display name and unit.
(a) Transmission
Transmit the command [0] [1] and the data No. corresponding to the status display item to be read,
[0] [0] to [0] [E] and [2] [0] to [2] [9]. (Refer to section 14.4.1.)
(b) Return
The slave station returns the status display name and unit requested.
0 0
Unit characters (5 digits)
Name characters (9 digits)
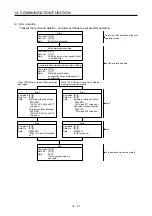
(2) Status display data reading
Read the status display data and processing information.
(a) Transmission
Transmit the command [0] [1] and the data No. corresponding to the status display item to be read,
[8] [0] to [8] [E] and [A] [0] to [A] [9]. (Refer to section 14.4.1.)
(b) Return
The slave station returns the status display data requested.
Display type
0: Data must be converted into decimal.
1: Data is used unchanged in hexadecimal.
Decimal point position
0: No decimal point
1: First least significant digit (normally not used)
2: Second least significant digit
3: Third least significant digit
4: Forth least significant digit
5: Fifth least significant digit
6: Sixth least significant digit
Data 32-bit length (hexadecimal representation)
(Data conversion is required as indicated in the display type.)
0 0
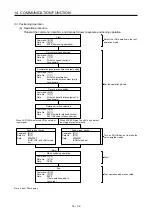
(3) Status display data clear
The cumulative feedback pulse data of the status display is cleared. Send this command immediately
after reading the status display item. The data of the status display item transmitted is cleared to "0".
Command
Data No.
Data
[8] [1]
[0] [0]
1EA5
For example, after sending command [0] [1] and data No. [8] [0] and receiving the status display data,
send command [8] [1], data No. [0] [0] and data [1EA5] to clear the cumulative feedback pulse value to
"0".
Summary of Contents for MR-J4-100A
Page 9: ...A 8 MEMO ...
Page 61: ...1 FUNCTIONS AND CONFIGURATION 1 44 MEMO ...
Page 67: ...2 INSTALLATION 2 6 MEMO ...
Page 137: ...3 SIGNALS AND WIRING 3 70 MEMO ...
Page 261: ...6 NORMAL GAIN ADJUSTMENT 6 24 MEMO ...
Page 291: ...7 SPECIAL ADJUSTMENT FUNCTIONS 7 30 MEMO ...
Page 299: ...8 TROUBLESHOOTING 8 8 MEMO ...
Page 319: ...9 OUTLINE DRAWINGS 9 20 MEMO ...
Page 461: ...12 ABSOLUTE POSITION DETECTION SYSTEM 12 36 MEMO ...
Page 511: ...14 COMMUNICATION FUNCTION 14 38 MEMO ...
Page 559: ...16 USING A DIRECT DRIVE MOTOR 16 20 MEMO ...
Page 583: ...17 FULLY CLOSED LOOP SYSTEM 17 24 MEMO ...
Page 621: ...APPENDIX App 38 ...
Page 639: ......







































































