



























14. COMMUNICATION FUNCTION
14 - 25
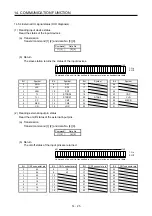
14.5.4 External I/O signal status (DIO diagnosis)
(1) Reading input device status
Read the status of the input devices.
(a) Transmission
Transmit command [1] [2] and data No. [0] [0].
Command
Data No.
[1] [2]
[0] [0]
(b) Return
The slave station returns the status of the input devices.
b31
b1b0
1: On
0: Off
Command of each bit is transmitted to the master station as hexadecimal data.
Bit Symbol
Bit Symbol
Bit Symbol
Bit Symbol
0 SON
8 SP1
16
24
1 LSP
9 SP2
17
25
2
LSN
10
SP3
18
26
3
TL
11
ST1/RS2 19
27
CDP
4
TL1
12
ST2/RS1 20
STAB2
28
CLD
5
PC
13
CM1
21
29
MECR
6
RES
14
CM2
22
30
7
CR
15
LOP
23
31
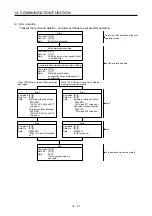
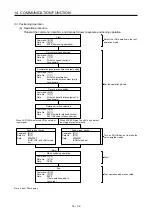
(2) Reading external input pin status
Read the on/off status of the external input pins.
(a) Transmission
Transmit command [1] [2] and data No. [4] [0].
Command
Data No.
[1] [2]
[4] [0]
(b) Return
The on/off status of the input pins are returned.
b31
b1b0
1: On
0: Off
Command of each bit is transmitted to the master station as hexadecimal data.
Bit
CN1 connector pin
Bit
CN1 connector pin
Bit
CN1 connector pin
Bit
CN1 connector pin
0 43
8 18
16
24
1 44
9 45
17
25
2
42
10
18
26
3
15
11
19
27
4
19
12
20
28
5
41
13
21
29
6
16
14
22
30
7
17
15
23
31
Summary of Contents for MR-J4-100A
Page 9: ...A 8 MEMO ...
Page 61: ...1 FUNCTIONS AND CONFIGURATION 1 44 MEMO ...
Page 67: ...2 INSTALLATION 2 6 MEMO ...
Page 137: ...3 SIGNALS AND WIRING 3 70 MEMO ...
Page 261: ...6 NORMAL GAIN ADJUSTMENT 6 24 MEMO ...
Page 291: ...7 SPECIAL ADJUSTMENT FUNCTIONS 7 30 MEMO ...
Page 299: ...8 TROUBLESHOOTING 8 8 MEMO ...
Page 319: ...9 OUTLINE DRAWINGS 9 20 MEMO ...
Page 461: ...12 ABSOLUTE POSITION DETECTION SYSTEM 12 36 MEMO ...
Page 511: ...14 COMMUNICATION FUNCTION 14 38 MEMO ...
Page 559: ...16 USING A DIRECT DRIVE MOTOR 16 20 MEMO ...
Page 583: ...17 FULLY CLOSED LOOP SYSTEM 17 24 MEMO ...
Page 621: ...APPENDIX App 38 ...
Page 639: ......







































































