


























15. USING A LINEAR SERVO MOTOR
15 - 8
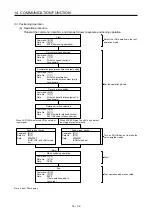
(3) Setting of linear encoder direction and linear servo motor direction
Set the first digit of [Pr. PC45] (Encoder pulse count polarity selection) so that the positive direction of
the linear servo motor matches with the increasing direction of the linear encoder feedback.
[Pr. PC45]
Encoder pulse count polarity selection
0: Linear servo motor positive direction and linear encoder increasing direction
1: Linear servo motor positive direction and linear encoder decreasing direction
(a) Parameter setting method
1) Confirm the positive direction of the linear servo motor. [Pr. PA14] determines the relation of the
travel direction of the linear servo motor under commands as shown below.
Travel direction of linear servo motor
[Pr. PA14] setting
Address increasing
command
Address decreasing
command
0
Positive direction
Negative direction
1
Negative direction
Positive direction
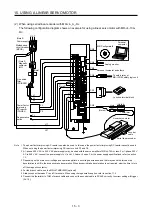
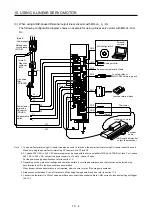
The positive/negative directions of the linear servo motor are as follows.
Secondary
side
Primary side
Positive direction
Negative direction
LM-H3 and LM-F series
Negative direction
Positive direction
Secondary side
Primary
side
LM-U2 series
Negative direction
Positive direction
Table
Primary side
Secondary
side
LM-K2 series
2) Confirm the increasing direction of the linear encoder.
3) If the positive direction of the linear servo motor matches with the increasing direction of the
linear encoder, set [Pr. PC45] to "_ _ _ 0". If the positive direction of the linear servo motor does
not match with the increasing direction of the linear encoder, set [Pr. PC45] to "_ _ _ 1".
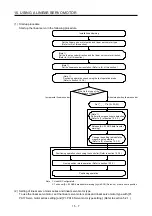
(b) Confirmation method
Confirm the positive direction of the linear servo motor and the increasing direction of the linear
encoder in the following procedure.
1) In servo-off status, move the linear servo motor in the positive direction manually.
2) Confirm the motor speed (in the positive and negative directions) at that time with MR
Configurator2.
3) When [Pr. PC45] is set to "_ _ _ 0" and the positive direction of the linear servo motor matches
with the increasing direction of the linear encoder, if the linear servo motor operates in the
positive direction, the motor speed will be a positive value. If the positive direction of the linear
servo motor does not match with the increasing direction of the linear encoder, the motor speed
will be a negative value. When [Pr. PC45] is set to "_ _ _ 1" and the positive direction of the linear
servo motor matches with the increasing direction of the linear encoder, if the linear servo motor
operates in the positive direction, the motor speed will be a negative value.
Summary of Contents for MR-J4-100A
Page 9: ...A 8 MEMO ...
Page 61: ...1 FUNCTIONS AND CONFIGURATION 1 44 MEMO ...
Page 67: ...2 INSTALLATION 2 6 MEMO ...
Page 137: ...3 SIGNALS AND WIRING 3 70 MEMO ...
Page 261: ...6 NORMAL GAIN ADJUSTMENT 6 24 MEMO ...
Page 291: ...7 SPECIAL ADJUSTMENT FUNCTIONS 7 30 MEMO ...
Page 299: ...8 TROUBLESHOOTING 8 8 MEMO ...
Page 319: ...9 OUTLINE DRAWINGS 9 20 MEMO ...
Page 461: ...12 ABSOLUTE POSITION DETECTION SYSTEM 12 36 MEMO ...
Page 511: ...14 COMMUNICATION FUNCTION 14 38 MEMO ...
Page 559: ...16 USING A DIRECT DRIVE MOTOR 16 20 MEMO ...
Page 583: ...17 FULLY CLOSED LOOP SYSTEM 17 24 MEMO ...
Page 621: ...APPENDIX App 38 ...
Page 639: ......







































































