





























16. USING A DIRECT DRIVE MOTOR
16 - 12
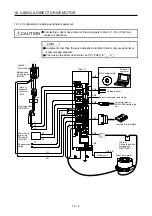
(c) Setting example
Existent
Non-existent
Alarm
Magnetic pole detection
[Pr. PL09] setting value
An alarm has occurred
when the setting value
of [Pr. PL09] is set to 70.
While increasing the setting value of [Pr. PL09], carry out the
magnetic pole detection repeatedly.
30
35
40
45
65
70
In this example, the final setting value of [Pr. PL09] is 49 (Setting value at the alarm occurrence = 70
× 0.7).
16.3.3 Function
(1) Servo control error detection function
POINT
For the servo control error detection function, the position and speed deviation
error detections are enabled by default. ([Pr. PL04]: _ _ _ 3)
If the servo control gets unstable for some reasons, the direct drive motor may not operate properly. To
detect this state and to stop operation, the servo control error detection function is used as a protective
function.
The servo control error detection function has three different detection methods: the position deviation,
speed deviation, and torque deviation. An error is detected when each method is enabled with [Pr. PL04
Linear servo motor/DD motor function selection 2]. The detection level can be changed with [Pr. PL05],
[Pr. PL06], and [Pr. PL07].
Servo amplifier internal value
1) Model feedback position [rev]
3) Model feedback speed [r/min]
5) Command torque [%]
Encoder
2) Feedback position [rev]
4) Feedback speed [r/min]
6) Feedback torque [%]
Servo amplifier
Direct drive motor
Encoder
Figure 16.1 Outline of servo control error detection function
(a) Position deviation error detection
Set [Pr. PL04] to "_ _ _ 1" to enable the position deviation error detection.
[Pr. PL04]
Position deviation error detection enabled
1
When you compare the model feedback position ( 1)) and the feedback position ( 2)) in figure 16.1, if
the deviation is more than the value of [Pr. PL05 Position deviation error detection level] (1 (0.01 rev)
to 1000 (10 rev)), [AL. 42.1 Servo control error by position deviation] will occur and the linear servo
motor will stop. The initial value of this detection level is 0.09 rev. Change the set value as
necessary.
Summary of Contents for MR-J4-100A
Page 9: ...A 8 MEMO ...
Page 61: ...1 FUNCTIONS AND CONFIGURATION 1 44 MEMO ...
Page 67: ...2 INSTALLATION 2 6 MEMO ...
Page 137: ...3 SIGNALS AND WIRING 3 70 MEMO ...
Page 261: ...6 NORMAL GAIN ADJUSTMENT 6 24 MEMO ...
Page 291: ...7 SPECIAL ADJUSTMENT FUNCTIONS 7 30 MEMO ...
Page 299: ...8 TROUBLESHOOTING 8 8 MEMO ...
Page 319: ...9 OUTLINE DRAWINGS 9 20 MEMO ...
Page 461: ...12 ABSOLUTE POSITION DETECTION SYSTEM 12 36 MEMO ...
Page 511: ...14 COMMUNICATION FUNCTION 14 38 MEMO ...
Page 559: ...16 USING A DIRECT DRIVE MOTOR 16 20 MEMO ...
Page 583: ...17 FULLY CLOSED LOOP SYSTEM 17 24 MEMO ...
Page 621: ...APPENDIX App 38 ...
Page 639: ......







































































