





























150
17.4.3.2. Multi-Hand Tool
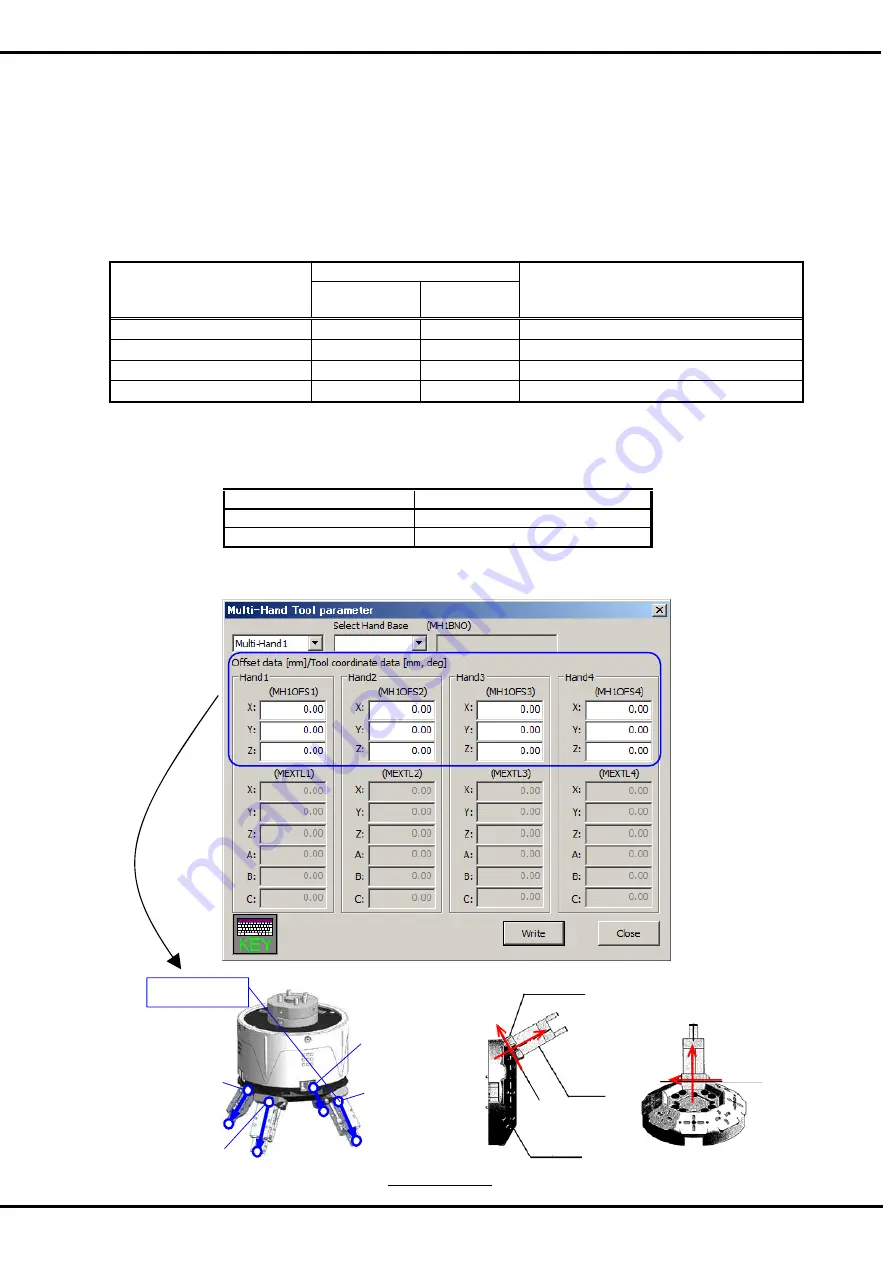
Selects the Hand Base of the Multi-Hand, set the offset value,
set the offset value of each hand to the selected
Hand Base.
The Multi-Hand Tool can be connected to the robot with remote Input/Output signals or parallel
Input/Output signals.
When the robot and the controller connected to this software correspond to the function of the 'Multi-Hand' , the
item concerning the Multi-Hand are displayed in the parameter menu. The robot and the software version of the
controller which can use the ‘Multi-Hand Tool’ are as follows.
Table 17-1 Robot that can use the ‘Multi-Hand Tool’
Connection method
Robot
Remote
Input/Output
Parallel
Input/Output
Notes
RV-2SQ/2SD series
○
Not use
RV-3SQ/3SD series
5-axis robot cannot use this parameter.
RV-6SQ/6SD series
RV-12SQ/12SD series
Not use
○
: By using the standard remote Input/Output,
: By using the special remote Input/Output
: By using the air hand interface
Table 17-2 Robot controller that can use the ‘Multi-Hand Tool’
Controller
S/W Ver. of the controller
CR750-D/CRnD-700
Ver.S2a or later
CR750-Q/CRnQ-700
Ver.R2a or later
This function is available from this software Ver.2.5 or later.
Mounting center
of Hand 2
Mounting center
of Hand 3
Mounting center
of Hand 4
Mounting center
of Hand 1
Hand 2
Hand 3
Hand 4
Hand 1
This position (vector) is
set as the offset.
+Y axis
+Z axis
+Z axis
+X axis
Hand adaptor
Hand
Hand base
Reference
surface
Reference
surface
Setting of offset
Summary of Contents for R56TB
Page 1: ...Mitsubishi Industrial Robot CR750 CRn 700 Series R56TB R57TB Instruction Manual BFP A8684 F...
Page 4: ...8 CAUTION CAUTION WARNING...
Page 6: ......
Page 12: ......
Page 126: ...114 Current2 a...
Page 173: ...161 17 4 9 5 Hand 17 4 9 6 Warm up...
Page 174: ...162 17 4 9 7 Start each slot 17 4 9 8 Stop each slot...
Page 175: ...163 17 4 9 9 Servo ON OFF each robot 17 4 9 10 Machine lock each robot...
Page 179: ...167...







































































