





























151
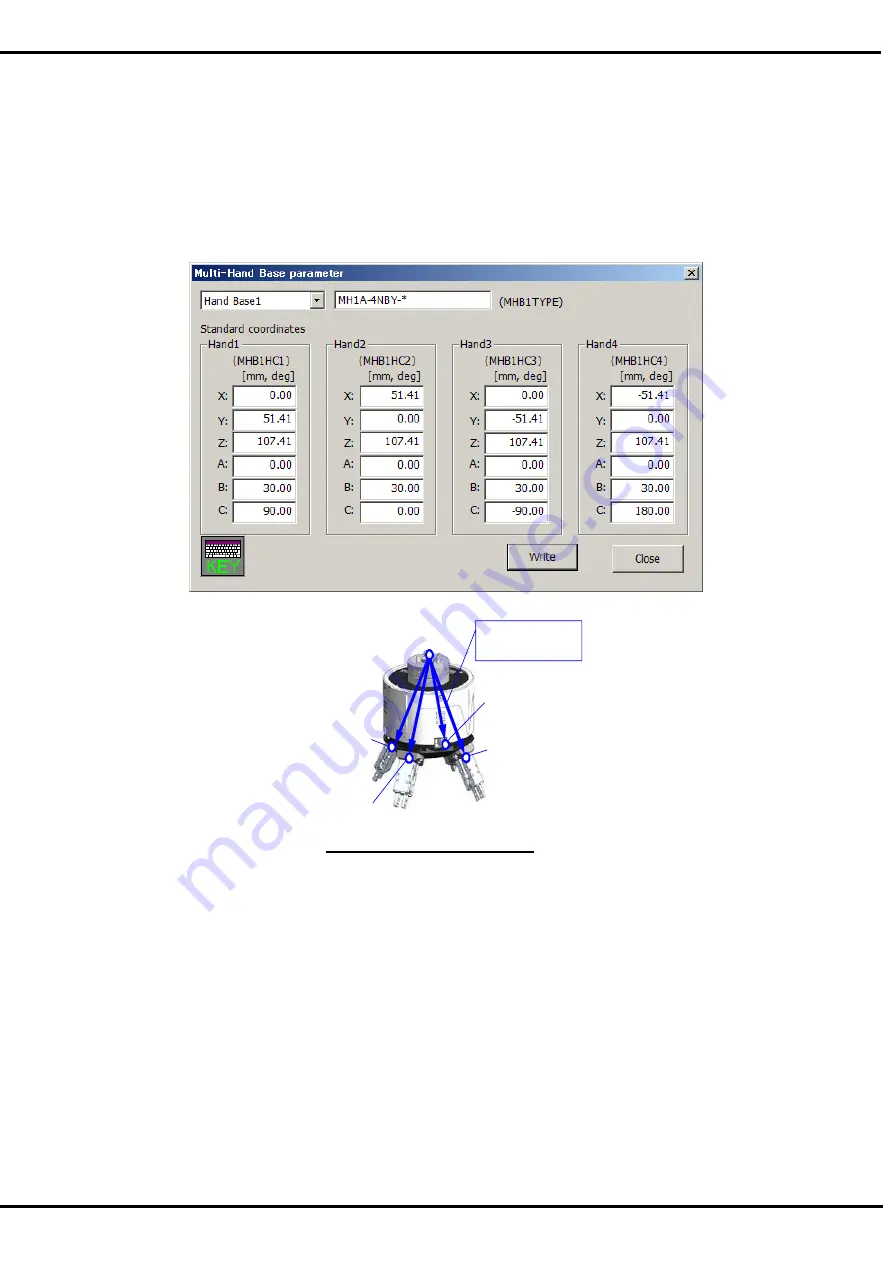
17.4.3.3. Multi-Hand Base
Set the type name of the hand base for the Multi Hand and the Normal coordinates value of each hand.
When the robot and the controller connected to this software correspond to the function of the 'Multi-Hand' , the
item concerning the Multi-Hand are displayed in the parameter menu. Please refer to
can use the ‘Multi-Hand Tool’ ”, ”Table 17-2 Robot controller that can use the ‘Multi-Hand Tool’ ”
for the
controller and the robot which can set the parameters about the Multi-Hand.
This function is available from this software Ver.2.5 or later.
Mounting center
of Hand 2
Mounting center
of Hand 3
Mounting center
of Hand 4
Mounting center
of Hand 1
The Center of
the mechanical interface
Setting of standard coordinates
Summary of Contents for R56TB
Page 1: ...Mitsubishi Industrial Robot CR750 CRn 700 Series R56TB R57TB Instruction Manual BFP A8684 F...
Page 4: ...8 CAUTION CAUTION WARNING...
Page 6: ......
Page 12: ......
Page 126: ...114 Current2 a...
Page 173: ...161 17 4 9 5 Hand 17 4 9 6 Warm up...
Page 174: ...162 17 4 9 7 Start each slot 17 4 9 8 Stop each slot...
Page 175: ...163 17 4 9 9 Servo ON OFF each robot 17 4 9 10 Machine lock each robot...
Page 179: ...167...
































































