





























9
8. Setting a target robot for using multi-mechanism control
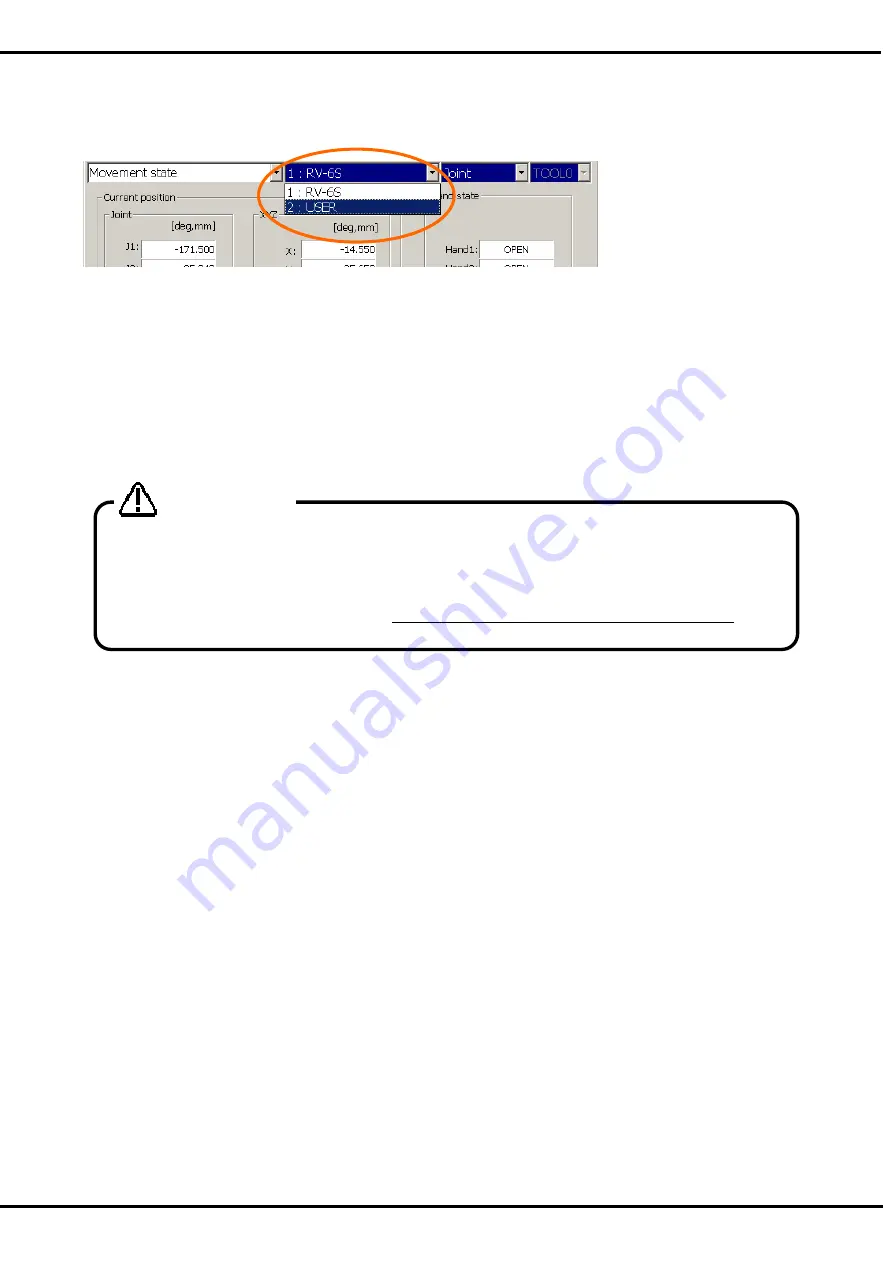
When using the multi-mechanism control, please select a target robot at the Select robot combo box.
The robot selected here becomes the object of the following operations and monitors.
- Servo
ON/OFF
- JOG
operation
- Hand
operation
- Direct
execution
- Position
jump
-
Releasing the brakes
-
Setting the origin
-
Various monitor functions
* Multi-mechanism control is the function to control up to two (excluding the standard robots) robots (user
mechanism) driven by servo motors, besides the standard robots. For more information, please refer to the
separate manual "ADDITIONAL AXIS INTERFACE".
About the target robot of the step operation
The robot which moves when the step operation is executed is the same as the robot which moves
when the program is executed by the automatic operating, regardless of the selection of robot at the
combo box.
When the GETM command is executed, the robot selected by the GETM command moves in the
execution of the robot operation commands after that.
CAUTION
Summary of Contents for R56TB
Page 1: ...Mitsubishi Industrial Robot CR750 CRn 700 Series R56TB R57TB Instruction Manual BFP A8684 F...
Page 4: ...8 CAUTION CAUTION WARNING...
Page 6: ......
Page 12: ......
Page 126: ...114 Current2 a...
Page 173: ...161 17 4 9 5 Hand 17 4 9 6 Warm up...
Page 174: ...162 17 4 9 7 Start each slot 17 4 9 8 Stop each slot...
Page 175: ...163 17 4 9 9 Servo ON OFF each robot 17 4 9 10 Machine lock each robot...
Page 179: ...167...



































































