





























155
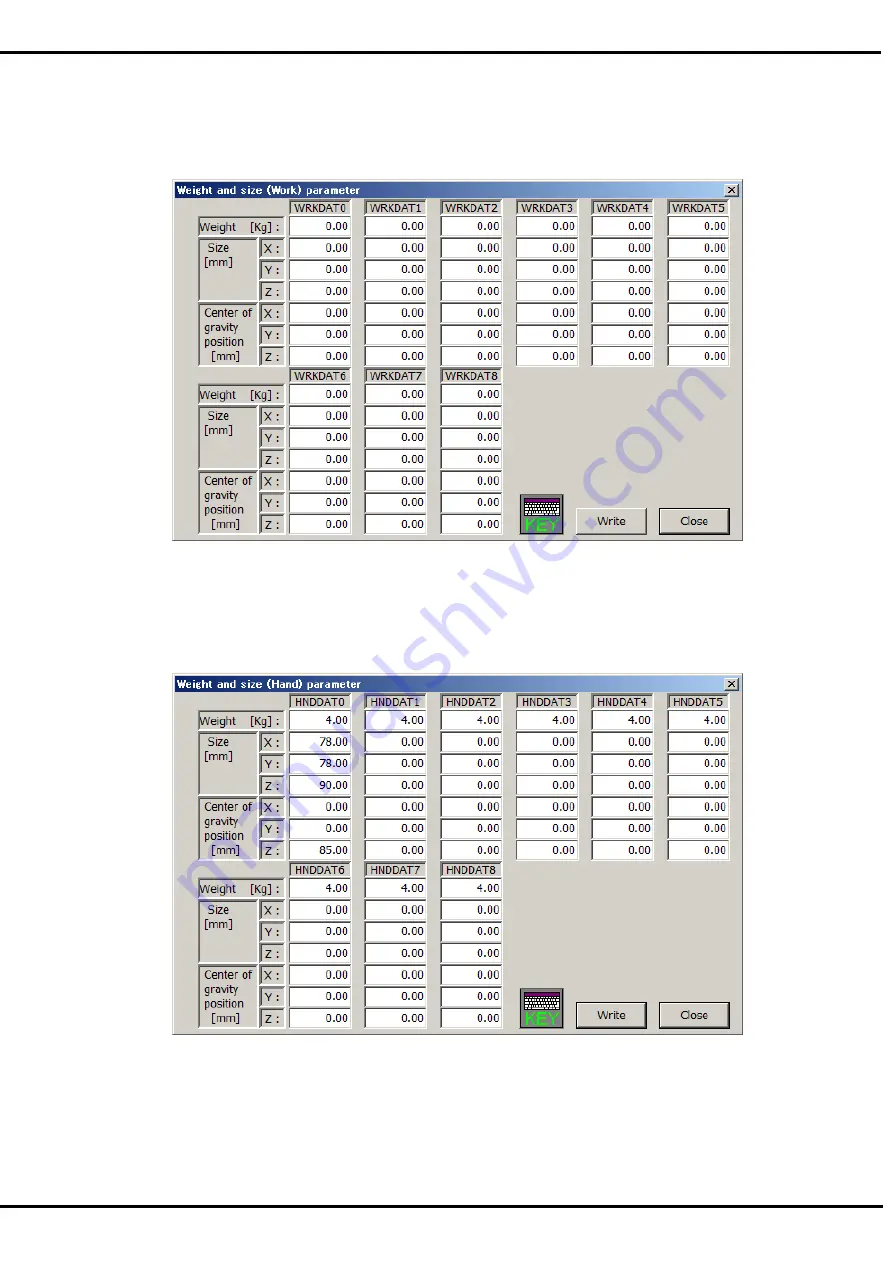
17.4.4. Weight and size (Work)
Set the work conditions.
WRKDAT0 might not be able to set according to the kind of the connected robot. In that case, the row of
WRKDAT0 cannot be input.
17.4.5. Weight and size (Hand)
Set the hand conditions.
HNDDAT0 might not be able to set according to the kind of the connected robot. In that case, the row of
HNDDAT0 cannot be input.
Summary of Contents for R56TB
Page 1: ...Mitsubishi Industrial Robot CR750 CRn 700 Series R56TB R57TB Instruction Manual BFP A8684 F...
Page 4: ...8 CAUTION CAUTION WARNING...
Page 6: ......
Page 12: ......
Page 126: ...114 Current2 a...
Page 173: ...161 17 4 9 5 Hand 17 4 9 6 Warm up...
Page 174: ...162 17 4 9 7 Start each slot 17 4 9 8 Stop each slot...
Page 175: ...163 17 4 9 9 Servo ON OFF each robot 17 4 9 10 Machine lock each robot...
Page 179: ...167...







































































