
























2
22
2Unpacking to Installation
Unpacking to Installation
Unpacking to Installation
Unpacking to Installation
Installation
Installation
Installation
Installation
2-
2-
2-
2-7
77
7
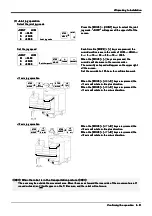
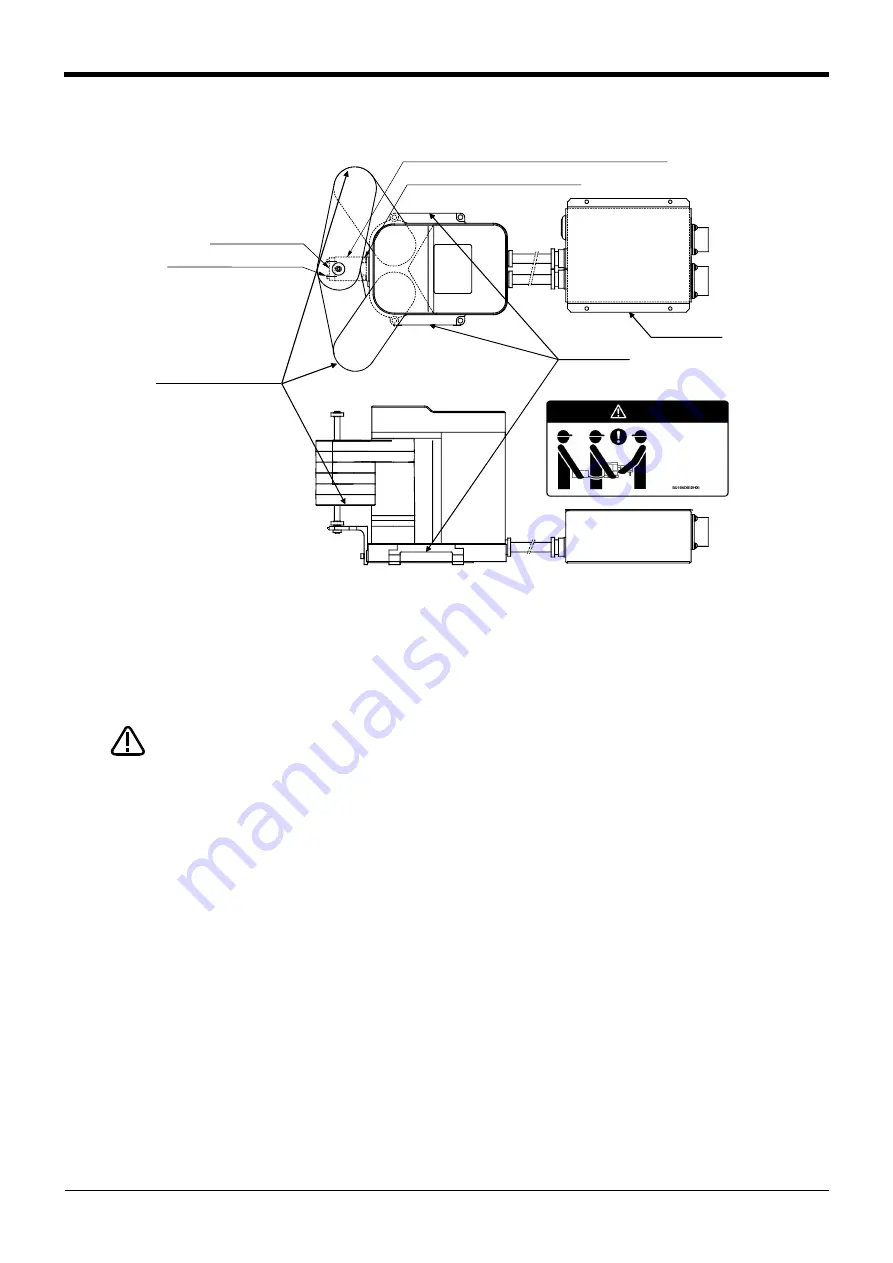
2.2.2 Transportation procedures
2.2.2 Transportation procedures
2.2.2 Transportation procedures
2.2.2 Transportation procedures
Fig.2-2
:
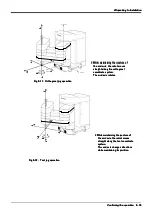
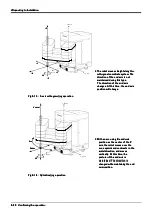
Transportation posture, transportation method, and fixing positions
Fig.2-2
:
Transportation posture, transportation method, and fixing positions
Fig.2-2
:
Transportation posture, transportation method, and fixing positions
Fig.2-2
:
Transportation posture, transportation method, and fixing positions
1
)
1
)
1
)
1
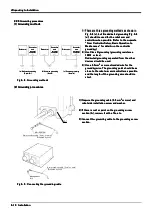
) Open the cardboard box, and remove the cushioning material fixing the robot arm and connector box.
Open the cardboard box, and remove the cushioning material fixing the robot arm and connector box.
Open the cardboard box, and remove the cushioning material fixing the robot arm and connector box.
Open the cardboard box, and remove the cushioning material fixing the robot arm and connector box.
2) When transporting the robot, leave the transportation jigs A and B in place to protect the arm from external
2) When transporting the robot, leave the transportation jigs A and B in place to protect the arm from external
2) When transporting the robot, leave the transportation jigs A and B in place to protect the arm from external
2) When transporting the robot, leave the transportation jigs A and B in place to protect the arm from external
force. Three workers must transport the robot for safety purposes.
force. Three workers must transport the robot for safety purposes.
force. Three workers must transport the robot for safety purposes.
force. Three workers must transport the robot for safety purposes.
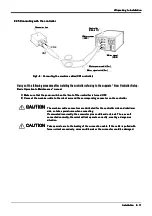
As shown in "Fig. 2-2Transportation posture, transportation method, and fixing positions", one worker
As shown in "Fig. 2-2Transportation posture, transportation method, and fixing positions", one worker
As shown in "Fig. 2-2Transportation posture, transportation method, and fixing positions", one worker
As shown in "Fig. 2-2Transportation posture, transportation method, and fixing positions", one worker
must hold the handle on the robot arm base, another worker must hold the robot arm, and a third worker
must hold the handle on the robot arm base, another worker must hold the robot arm, and a third worker
must hold the handle on the robot arm base, another worker must hold the robot arm, and a third worker
must hold the handle on the robot arm base, another worker must hold the robot arm, and a third worker
must hold the connector box.
must hold the connector box.
must hold the connector box.
must hold the connector box.
To prevent accidents, do not hold the axis section on the end of the robot, or pull the
To prevent accidents, do not hold the axis section on the end of the robot, or pull the
To prevent accidents, do not hold the axis section on the end of the robot, or pull the
To prevent accidents, do not hold the axis section on the end of the robot, or pull the
cables.
cables.
cables.
cables.
3) Avoid applying vibration or impact when transferring the robot to the installation place.
3) Avoid applying vibration or impact when transferring the robot to the installation place.
3) Avoid applying vibration or impact when transferring the robot to the installation place.
3) Avoid applying vibration or impact when transferring the robot to the installation place.
4) Remove the transportation jigs A and B after installing at the installation place. Always remove
4) Remove the transportation jigs A and B after installing at the installation place. Always remove
4) Remove the transportation jigs A and B after installing at the installation place. Always remove
4) Remove the transportation jigs A and B after installing at the installation place. Always remove
transportation jigs A and B before starting the robot operation.
transportation jigs A and B before starting the robot operation.
transportation jigs A and B before starting the robot operation.
transportation jigs A and B before starting the robot operation.
5) Use the same transportation procedures described above during secondary transportation, such as when
5) Use the same transportation procedures described above during secondary transportation, such as when
5) Use the same transportation procedures described above during secondary transportation, such as when
5) Use the same transportation procedures described above during secondary transportation, such as when
changing the installation place. If the arm section is lifted without using the designated transportation jigs, or
changing the installation place. If the arm section is lifted without using the designated transportation jigs, or
changing the installation place. If the arm section is lifted without using the designated transportation jigs, or
changing the installation place. If the arm section is lifted without using the designated transportation jigs, or
if the robot is transferred in the work posture, hazards could occur during the transportation work, such as
if the robot is transferred in the work posture, hazards could occur during the transportation work, such as
if the robot is transferred in the work posture, hazards could occur during the transportation work, such as
if the robot is transferred in the work posture, hazards could occur during the transportation work, such as
the configuration devices being damaged or the center of gravity position being deviated.
the configuration devices being damaged or the center of gravity position being deviated.
the configuration devices being damaged or the center of gravity position being deviated.
the configuration devices being damaged or the center of gravity position being deviated.
Transportation jig A (RP-
1
AH/
1
AHC-SB)
Transportation jig A fixing bolt
M4
×1
2
M3
× 1
4
Base handle
(
1
st worker)
Connector box
(3rd worker)
Transportation jig B
Support for transportation
(2nd worker)
Transportation jig B fixing bolt
The robot must be
The robot must be
The robot must be
The robot must be
transported by three
transported by three
transported by three
transported by three
workers as shown in
workers as shown in
workers as shown in
workers as shown in
the drawing.
the drawing.
the drawing.
the drawing.
Other transportation
Other transportation
Other transportation
Other transportation
methods could cause
methods could cause
methods could cause
methods could cause
the robot arm to tilt
the robot arm to tilt
the robot arm to tilt
the robot arm to tilt
over or drop.
over or drop.
over or drop.
over or drop.
CAUTION
Transportation jig D fixing bolt
M4
×1
2
Transportation jig D (RP-3AH/3AHC-SB/5AH/5AHC-SB)
CAUTION
CAUTION
CAUTION
CAUTION






























































