
























2
22
2Unpacking to Installation
Unpacking to Installation
Unpacking to Installation
Unpacking to Installation
Installation
Installation
Installation
Installation
2-
2-
2-
2-9
99
9
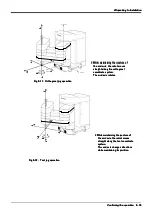
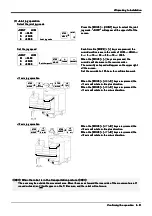
The installation surface of the robot arm has been machined finished, so securely fix the robot arm with the
The installation surface of the robot arm has been machined finished, so securely fix the robot arm with the
The installation surface of the robot arm has been machined finished, so securely fix the robot arm with the
The installation surface of the robot arm has been machined finished, so securely fix the robot arm with the
installation holes (RP-
1
AH
installation holes (RP-
1
AH
installation holes (RP-
1
AH
installation holes (RP-
1
AH/
1
AHC-SB
/
1
AHC-SB
/
1
AHC-SB
/
1
AHC-SB: 4-
φ
7 hole, RP-3AH
: 4-
φ
7 hole, RP-3AH
: 4-
φ
7 hole, RP-3AH
: 4-
φ
7 hole, RP-3AH/3AHC-SB
/3AHC-SB
/3AHC-SB
/3AHC-SB/5AH
/5AH
/5AH
/5AH/5AHC-SB
/5AHC-SB
/5AHC-SB
/5AHC-SB: 4-
φ
9 hole) provided at
: 4-
φ
9 hole) provided at
: 4-
φ
9 hole) provided at
: 4-
φ
9 hole) provided at
the four corners of the base and the enclosed installation bolts (RP-
1
AH
the four corners of the base and the enclosed installation bolts (RP-
1
AH
the four corners of the base and the enclosed installation bolts (RP-
1
AH
the four corners of the base and the enclosed installation bolts (RP-
1
AH/
1
AHC-SB
/
1
AHC-SB
/
1
AHC-SB
/
1
AHC-SB: M6
: M6
: M6
: M6
x
x
x
x
35 hexagon socket
35 hexagon socket
35 hexagon socket
35 hexagon socket
bolts, RP-3AH
bolts, RP-3AH
bolts, RP-3AH
bolts, RP-3AH/3AHC-SB
/3AHC-SB
/3AHC-SB
/3AHC-SB/5AH
/5AH
/5AH
/5AH/5AHC-SB
/5AHC-SB
/5AHC-SB
/5AHC-SB: M8
: M8
: M8
: M8
x
x
x
x
40 hexagon socket bolts).
40 hexagon socket bolts).
40 hexagon socket bolts).
40 hexagon socket bolts).
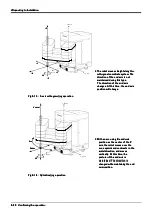
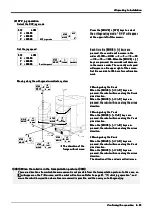
Installation of the robot arm is a very important step for ensuring the optimum functions of the robot. Observe
Installation of the robot arm is a very important step for ensuring the optimum functions of the robot. Observe
Installation of the robot arm is a very important step for ensuring the optimum functions of the robot. Observe
Installation of the robot arm is a very important step for ensuring the optimum functions of the robot. Observe
the following points when designing.
the following points when designing.
the following points when designing.
the following points when designing.
1
) Keep the installation surface flat.
1
) Keep the installation surface flat.
1
) Keep the installation surface flat.
1
) Keep the installation surface flat.
2) The surface roughness of the installation surface should be
▽▽
or more. If the installation surface is
2) The surface roughness of the installation surface should be
▽▽
or more. If the installation surface is
2) The surface roughness of the installation surface should be
▽▽
or more. If the installation surface is
2) The surface roughness of the installation surface should be
▽▽
or more. If the installation surface is
rough, the robot seating will be poor, and positional deviation could occur when the robot is operated.
rough, the robot seating will be poor, and positional deviation could occur when the robot is operated.
rough, the robot seating will be poor, and positional deviation could occur when the robot is operated.
rough, the robot seating will be poor, and positional deviation could occur when the robot is operated.
3) It is recommended to use a common table when installing to prevent positional deviation of the devices and
3) It is recommended to use a common table when installing to prevent positional deviation of the devices and
3) It is recommended to use a common table when installing to prevent positional deviation of the devices and
3) It is recommended to use a common table when installing to prevent positional deviation of the devices and
jigs targeted for robot work.
jigs targeted for robot work.
jigs targeted for robot work.
jigs targeted for robot work.
4) Make sure that the installation surface has sufficient rigidity to prevent deformation or vibration caused by
4) Make sure that the installation surface has sufficient rigidity to prevent deformation or vibration caused by
4) Make sure that the installation surface has sufficient rigidity to prevent deformation or vibration caused by
4) Make sure that the installation surface has sufficient rigidity to prevent deformation or vibration caused by
the arm reaction during operation, and from the static (dynamic) load of the robot arm and peripheral
the arm reaction during operation, and from the static (dynamic) load of the robot arm and peripheral
the arm reaction during operation, and from the static (dynamic) load of the robot arm and peripheral
the arm reaction during operation, and from the static (dynamic) load of the robot arm and peripheral
devices.
devices.
devices.
devices.
5)
5)
5)
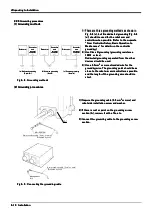
5) Fix the connector box with M4 hexagon socket bolts. (To be prepared by user. Should have length of
1
0mm
Fix the connector box with M4 hexagon socket bolts. (To be prepared by user. Should have length of
1
0mm
Fix the connector box with M4 hexagon socket bolts. (To be prepared by user. Should have length of
1
0mm
Fix the connector box with M4 hexagon socket bolts. (To be prepared by user. Should have length of
1
0mm
or more.)
or more.)
or more.)
or more.)







































































