

























2
22
2Unpacking to Installation
Unpacking to Installation
Unpacking to Installation
Unpacking to Installation
Confirming the operation
Confirming the operation
Confirming the operation
Confirming the operation
2-
2-
2-
2-29
29
29
29
(5)
(5)
(5)
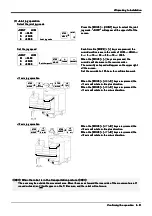
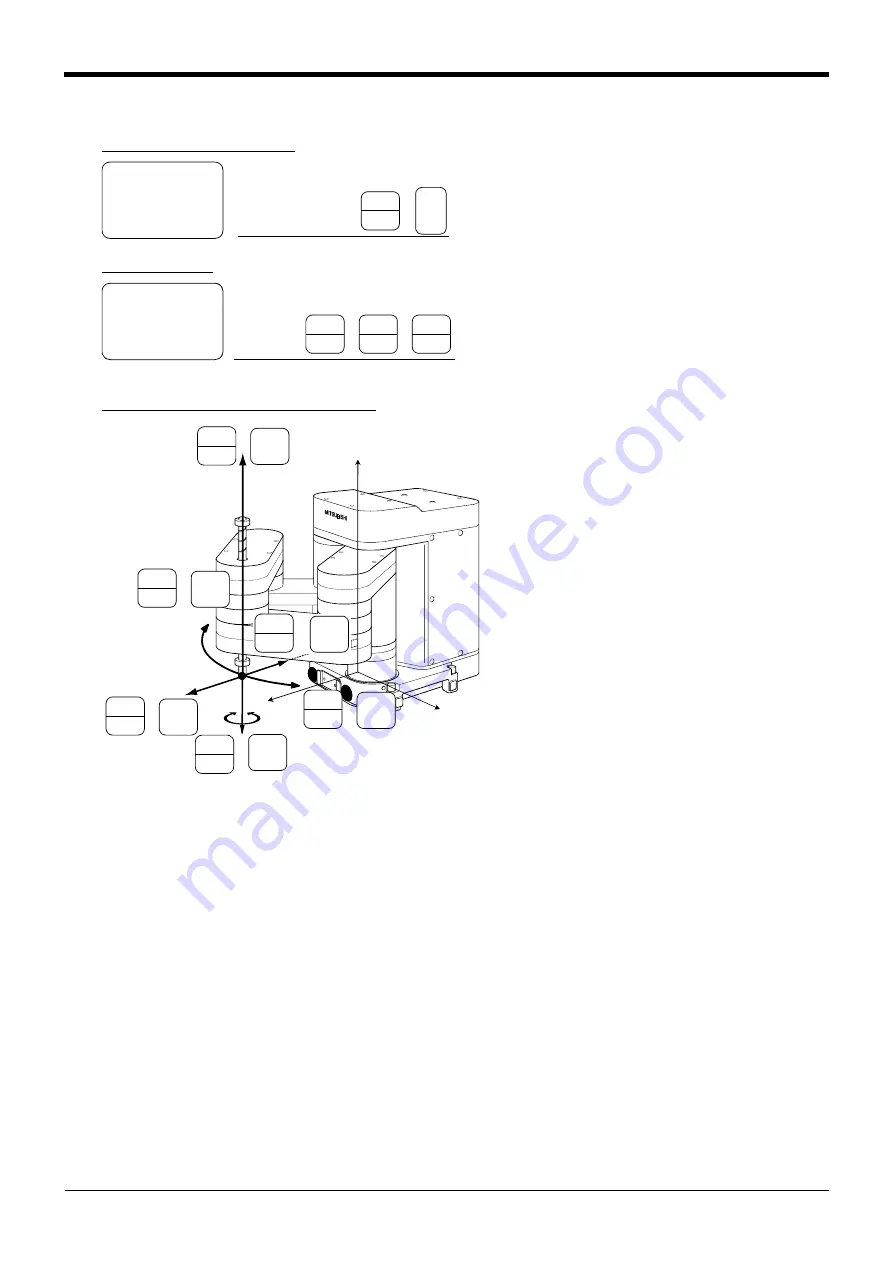
(5) Cylindrical jog operation
Cylindrical jog operation
Cylindrical jog operation
Cylindrical jog operation
Press the [MOVE] + [XYZ] keys, and then press
Press the [MOVE] + [XYZ] keys, and then press
Press the [MOVE] + [XYZ] keys, and then press
Press the [MOVE] + [XYZ] keys, and then press
only the [XYZ] key. "CYLNDER" will appear at the
only the [XYZ] key. "CYLNDER" will appear at the
only the [XYZ] key. "CYLNDER" will appear at the
only the [XYZ] key. "CYLNDER" will appear at the
upper left of the screen.
upper left of the screen.
upper left of the screen.
upper left of the screen.
Each time the [MOVE] + [+] keys are pressed, the
Each time the [MOVE] + [+] keys are pressed, the
Each time the [MOVE] + [+] keys are pressed, the
Each time the [MOVE] + [+] keys are pressed, the
override will increase in the order of LOW
→
HIGH
override will increase in the order of LOW
→
HIGH
override will increase in the order of LOW
→
HIGH
override will increase in the order of LOW
→
HIGH
→
3
→
5
→
1
0
→
30
→
50
→
70
→
1
00%. When
→
3
→
5
→
1
0
→
30
→
50
→
70
→
1
00%. When
→
3
→
5
→
1
0
→
30
→
50
→
70
→
1
00%. When
→
3
→
5
→
1
0
→
30
→
50
→
70
→
1
00%. When
the [MOVE] + [-] keys are pressed, the override will
the [MOVE] + [-] keys are pressed, the override will
the [MOVE] + [-] keys are pressed, the override will
the [MOVE] + [-] keys are pressed, the override will
decrease in the reverse order. The currently set
decrease in the reverse order. The currently set
decrease in the reverse order. The currently set
decrease in the reverse order. The currently set
speed will appear on the upper right of the screen.
speed will appear on the upper right of the screen.
speed will appear on the upper right of the screen.
speed will appear on the upper right of the screen.
Set the override to
1
0% here for confirmation work.
Set the override to
1
0% here for confirmation work.
Set the override to
1
0% here for confirmation work.
Set the override to
1
0% here for confirmation work.
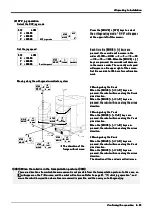
* Moving along an arc
* Moving along an arc
* Moving along an arc
* Moving along an arc
Assuming that the current position is on an
Assuming that the current position is on an
Assuming that the current position is on an
Assuming that the current position is on an
arc centering on the Z axis, the robot moves
arc centering on the Z axis, the robot moves
arc centering on the Z axis, the robot moves
arc centering on the Z axis, the robot moves
along that arc.
along that arc.
along that arc.
along that arc.
When the [MOVE] + [+Y (J2)] keys are
When the [MOVE] + [+Y (J2)] keys are
When the [MOVE] + [+Y (J2)] keys are
When the [MOVE] + [+Y (J2)] keys are
pressed, the robot will move along the arc in
pressed, the robot will move along the arc in
pressed, the robot will move along the arc in
pressed, the robot will move along the arc in
the plus direction.
the plus direction.
the plus direction.
the plus direction.
When the [MOVE] + [-Y (J2)] keys are
When the [MOVE] + [-Y (J2)] keys are
When the [MOVE] + [-Y (J2)] keys are
When the [MOVE] + [-Y (J2)] keys are
pressed, the robot will move in the minus
pressed, the robot will move in the minus
pressed, the robot will move in the minus
pressed, the robot will move in the minus
direction.
direction.
direction.
direction.
* Moving in the radial direction
* Moving in the radial direction
* Moving in the radial direction
* Moving in the radial direction
Assuming that the current position is on an
Assuming that the current position is on an
Assuming that the current position is on an
Assuming that the current position is on an
arc centering on the Z axis, the robot will
arc centering on the Z axis, the robot will
arc centering on the Z axis, the robot will
arc centering on the Z axis, the robot will
expand and contract in the radial direction.
expand and contract in the radial direction.
expand and contract in the radial direction.
expand and contract in the radial direction.
When the [MOVE] + [+X (J
1
)] keys are
When the [MOVE] + [+X (J
1
)] keys are
When the [MOVE] + [+X (J
1
)] keys are
When the [MOVE] + [+X (J
1
)] keys are
pressed, the robot will expand in the radial
pressed, the robot will expand in the radial
pressed, the robot will expand in the radial
pressed, the robot will expand in the radial
direction
direction
direction
direction
When the [MOVE] + [+X (J
1
)] keys are
When the [MOVE] + [+X (J
1
)] keys are
When the [MOVE] + [+X (J
1
)] keys are
When the [MOVE] + [+X (J
1
)] keys are
pressed, the robot will contract in the radial
pressed, the robot will contract in the radial
pressed, the robot will contract in the radial
pressed, the robot will contract in the radial
direction
direction
direction
direction
* Moving along the Z axis
* Moving along the Z axis
* Moving along the Z axis
* Moving along the Z axis
When the [MOVE] + [+Z (J3)] keys are
When the [MOVE] + [+Z (J3)] keys are
When the [MOVE] + [+Z (J3)] keys are
When the [MOVE] + [+Z (J3)] keys are
pressed, the robot will move along the Z axis
pressed, the robot will move along the Z axis
pressed, the robot will move along the Z axis
pressed, the robot will move along the Z axis
plus direction.
plus direction.
plus direction.
plus direction.
When the [MOVE] + [-Z (J3)] keys are
When the [MOVE] + [-Z (J3)] keys are
When the [MOVE] + [-Z (J3)] keys are
When the [MOVE] + [-Z (J3)] keys are
pressed, the robot will move along the minus
pressed, the robot will move along the minus
pressed, the robot will move along the minus
pressed, the robot will move along the minus
direction.
direction.
direction.
direction.
CYLNDER LOW
CYLNDER LOW
CYLNDER LOW
CYLNDER LOW
R +
1
34.50
R +
1
34.50
R +
1
34.50
R +
1
34.50
T +220.00
T +220.00
T +220.00
T +220.00
Z +280.00
Z +280.00
Z +280.00
Z +280.00
Select the cylindrical jog mode
Select the cylindrical jog mode
Select the cylindrical jog mode
Select the cylindrical jog mode
CYLNDER LOW
CYLNDER LOW
CYLNDER LOW
CYLNDER LOW
R +
1
34.50
R +
1
34.50
R +
1
34.50
R +
1
34.50
T +220.00
T +220.00
T +220.00
T +220.00
Z +280.00
Z +280.00
Z +280.00
Z +280.00
Set the jog speed
Set the jog speed
Set the jog speed
Set the jog speed
+
+
+
+
Cylindrical jog mode
Cylindrical jog mode
Cylindrical jog mode
Cylindrical jog mode
STEP
STEP
STEP
STEP
MOVE
MOVE
MOVE
MOVE
XYZ
XYZ
XYZ
XYZ
$":
$":
$":
$":
Set the speed
Set the speed
Set the speed
Set the speed
+
+
+
+
STEP
STEP
STEP
STEP
MOVE
MOVE
MOVE
MOVE
+
+
+
+
FORWD
FORWD
FORWD
FORWD
-
-
-
-
BACKWD
BACKWD
BACKWD
BACKWD
+X
axis
+Y
axis
+Z
axis
-
-
-
-
+
+
+
+
J4
J4
J4
J4
Arc
Arc
Arc
Arc
Radius
Radius
Radius
Radius
Vertical
Vertical
Vertical
Vertical
Moving along an arc centering on the Z axis
Moving along an arc centering on the Z axis
Moving along an arc centering on the Z axis
Moving along an arc centering on the Z axis
*
The direction of the
*
The direction of the
*
The direction of the
*
The direction of the
frange will not move.
frange will not move.
frange will not move.
frange will not move.
+
+
+
+
STEP
STEP
STEP
STEP
MOVE
MOVE
MOVE
MOVE
+Z
+Z
+Z
+Z
(J3)
(J3)
(J3)
(J3)
8
88
8
,@
\
,@
\
,@
\
,@
\
+
+
+
+
STEP
STEP
STEP
STEP
MOVE
MOVE
MOVE
MOVE
-Z
-Z
-Z
-Z
(J3)
(J3)
(J3)
(J3)
3
33
3
JKL
JKL
JKL
JKL
+
+
+
+
STEP
STEP
STEP
STEP
MOVE
MOVE
MOVE
MOVE
-Y
-Y
-Y
-Y
(J2)
(J2)
(J2)
(J2)
4
4
4
4
MNO
MNO
MNO
MNO
+X
+X
+X
+X
(J
1
)
(J
1
)
(J
1
)
(J
1
)
’; ^
’; ^
’; ^
’; ^
+
+
+
+
STEP
STEP
STEP
STEP
MOVE
MOVE
MOVE
MOVE
+Y
+Y
+Y
+Y
(J2)
(J2)
(J2)
(J2)
9
9
9
9
&<>
&<>
&<>
&<>
+
+
+
+
STEP
STEP
STEP
STEP
MOVE
MOVE
MOVE
MOVE
+
+
+
+
STEP
STEP
STEP
STEP
MOVE
MOVE
MOVE
MOVE
-X
-X
-X
-X
(J
1
)
(J
1
)
(J
1
)
(J
1
)
SPACE
SPACE
SPACE
SPACE
PQR
PQR
PQR
PQR







































































