

















5
55
5-
--
-58
58
58
58
Resetting the origin
Resetting the origin
Resetting the origin
Resetting the origin
5
55
5Maintenance and Inspection
Maintenance and Inspection
Maintenance and Inspection
Maintenance and Inspection
5.5.2
5.5.2
5.5.2
5.5.2 User origin method
User origin method
User origin method
User origin method
The procedure for setting the origin with the user origin method is explained below.
The procedure for setting the origin with the user origin method is explained below.
The procedure for setting the origin with the user origin method is explained below.
The procedure for setting the origin with the user origin method is explained below.
This operation is carried out with the teaching pendant. Set the [MODE] switch on the front of the controller to
This operation is carried out with the teaching pendant. Set the [MODE] switch on the front of the controller to
This operation is carried out with the teaching pendant. Set the [MODE] switch on the front of the controller to
This operation is carried out with the teaching pendant. Set the [MODE] switch on the front of the controller to
"TEACH", and set the [ENABLE/DISABLE] switch on the teaching pendant to "ENABLE" to enable the teaching
"TEACH", and set the [ENABLE/DISABLE] switch on the teaching pendant to "ENABLE" to enable the teaching
"TEACH", and set the [ENABLE/DISABLE] switch on the teaching pendant to "ENABLE" to enable the teaching
"TEACH", and set the [ENABLE/DISABLE] switch on the teaching pendant to "ENABLE" to enable the teaching
pendant.
pendant.
pendant.
pendant.
The operation method is shown below.
The operation method is shown below.
The operation method is shown below.
The operation method is shown below.
When setting the origin for the first time using this method, carry out the operations in order from step
1
). For the
When setting the origin for the first time using this method, carry out the operations in order from step
1
). For the
When setting the origin for the first time using this method, carry out the operations in order from step
1
). For the
When setting the origin for the first time using this method, carry out the operations in order from step
1
). For the
second and following time, move the robot arm to the user origin position with jog operation, and accurately
second and following time, move the robot arm to the user origin position with jog operation, and accurately
second and following time, move the robot arm to the user origin position with jog operation, and accurately
second and following time, move the robot arm to the user origin position with jog operation, and accurately
position all axes. Then start the procedure from step 4).
position all axes. Then start the procedure from step 4).
position all axes. Then start the procedure from step 4).
position all axes. Then start the procedure from step 4).
1
) Determine the user origin position
1
) Determine the user origin position
1
) Determine the user origin position
1
) Determine the user origin position
Move the robot to the position to be set as the origin with jog operation. Refer to "2.4 Confirming the
Move the robot to the position to be set as the origin with jog operation. Refer to "2.4 Confirming the
Move the robot to the position to be set as the origin with jog operation. Refer to "2.4 Confirming the
Move the robot to the position to be set as the origin with jog operation. Refer to "2.4 Confirming the
operation" on page
1
8 for details on the jog operation.
operation" on page
1
8 for details on the jog operation.
operation" on page
1
8 for details on the jog operation.
operation" on page
1
8 for details on the jog operation.
[Caution] This position is left as a guideline to position all axes with jog operation when setting the origin again
[Caution] This position is left as a guideline to position all axes with jog operation when setting the origin again
[Caution] This position is left as a guideline to position all axes with jog operation when setting the origin again
[Caution] This position is left as a guideline to position all axes with jog operation when setting the origin again
with this method.
with this method.
with this method.
with this method.
2) Enter the joint jog mode, and display the joint coordinates on the teaching pendant screen. Record the
2) Enter the joint jog mode, and display the joint coordinates on the teaching pendant screen. Record the
2) Enter the joint jog mode, and display the joint coordinates on the teaching pendant screen. Record the
2) Enter the joint jog mode, and display the joint coordinates on the teaching pendant screen. Record the
value of the axis for which the origin is to be set.
value of the axis for which the origin is to be set.
value of the axis for which the origin is to be set.
value of the axis for which the origin is to be set.
3) Input the value recorded in the "user designated origin parameter (USRORG)".
3) Input the value recorded in the "user designated origin parameter (USRORG)".
3) Input the value recorded in the "user designated origin parameter (USRORG)".
3) Input the value recorded in the "user designated origin parameter (USRORG)".
The parameter details and input methods are described in the separate "Instruction Manual/Detailed
The parameter details and input methods are described in the separate "Instruction Manual/Detailed
The parameter details and input methods are described in the separate "Instruction Manual/Detailed
The parameter details and input methods are described in the separate "Instruction Manual/Detailed
Explanation of Functions and Operations". Refer to that manual and input the user designated origin
Explanation of Functions and Operations". Refer to that manual and input the user designated origin
Explanation of Functions and Operations". Refer to that manual and input the user designated origin
Explanation of Functions and Operations". Refer to that manual and input the user designated origin
position.
position.
position.
position.
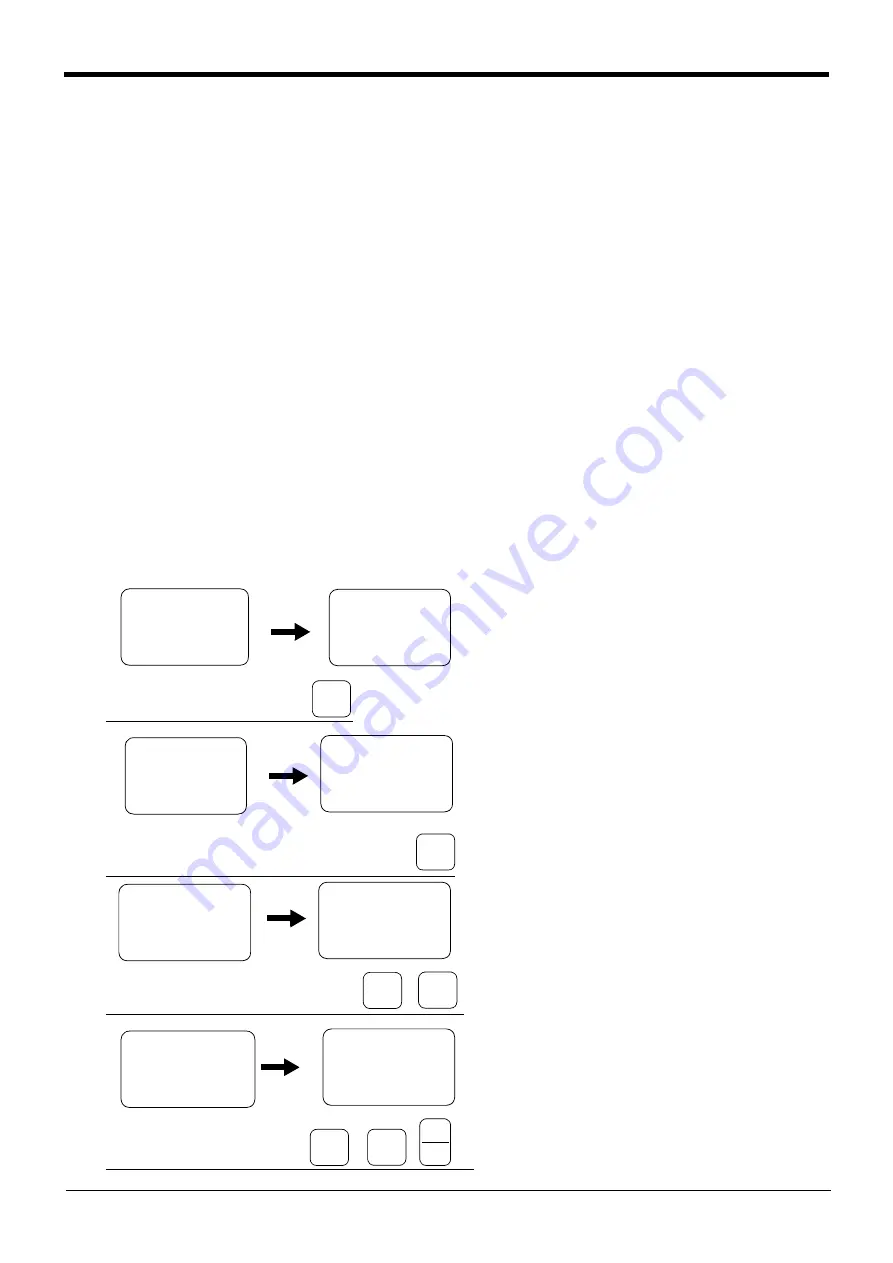
4) Next, set the origin.
4) Next, set the origin.
4) Next, set the origin.
4) Next, set the origin.
Press the [MENU] key to display the Menu
Press the [MENU] key to display the Menu
Press the [MENU] key to display the Menu
Press the [MENU] key to display the Menu
screen.
screen.
screen.
screen.
5) Press the [5] key to display the Maintenance
5) Press the [5] key to display the Maintenance
5) Press the [5] key to display the Maintenance
5) Press the [5] key to display the Maintenance
screen.
screen.
screen.
screen.
6) Press the [4] key to select the Origin Setting
6) Press the [4] key to select the Origin Setting
6) Press the [4] key to select the Origin Setting
6) Press the [4] key to select the Origin Setting
screen.
screen.
screen.
screen.
7) Press the [5] key to select the user origin
7) Press the [5] key to select the user origin
7) Press the [5] key to select the user origin
7) Press the [5] key to select the user origin
method.
method.
method.
method.
Then, press [
1
] key and [INP] key to turn OFF
Then, press [
1
] key and [INP] key to turn OFF
Then, press [
1
] key and [INP] key to turn OFF
Then, press [
1
] key and [INP] key to turn OFF
the servo.
the servo.
the servo.
the servo.
8) Press the [(] key, and input "
1
" for the axis for
8) Press the [(] key, and input "
1
" for the axis for
8) Press the [(] key, and input "
1
" for the axis for
8) Press the [(] key, and input "
1
" for the axis for
which the origin is to be set. Press the [INP]
which the origin is to be set. Press the [INP]
which the origin is to be set. Press the [INP]
which the origin is to be set. Press the [INP]
key to display the Confirmation screen.
key to display the Confirmation screen.
key to display the Confirmation screen.
key to display the Confirmation screen.
<MENU>
<MENU>
<MENU>
<MENU>
1
.TEACH 2.RUN
1
.TEACH 2.RUN
1
.TEACH 2.RUN
1
.TEACH 2.RUN
3.FILE 4.MONI
3.FILE 4.MONI
3.FILE 4.MONI
3.FILE 4.MONI
5.MAINT 6.SET
5.MAINT 6.SET
5.MAINT 6.SET
5.MAINT 6.SET
<MAINT>
<MAINT>
<MAINT>
<MAINT>
1
.
1
.
1
.
1
.PARAM 2.INIT
PARAM 2.INIT
PARAM 2.INIT
PARAM 2.INIT
3.BRAKE
3.BRAKE
3.BRAKE
3.BRAKE
4.ORIGIN
4.ORIGIN
4.ORIGIN
4.ORIGIN
Display the maintenance screen
Display the maintenance screen
Display the maintenance screen
Display the maintenance screen
<USER>
<USER>
<USER>
<USER>
SERVO OFF
SERVO OFF
SERVO OFF
SERVO OFF
OK ? (
1
)
OK ? (
1
)
OK ? (
1
)
OK ? (
1
)
1
:EXECUTE
1
:EXECUTE
1
:EXECUTE
1
:EXECUTE
Select the origin method and servo OFF
Select the origin method and servo OFF
Select the origin method and servo OFF
Select the origin method and servo OFF
<MAINT>
<MAINT>
<MAINT>
<MAINT>
1
.
1
.
1
.
1
.PARAM 2.INIT
PARAM 2.INIT
PARAM 2.INIT
PARAM 2.INIT
3.BRAKE
3.BRAKE
3.BRAKE
3.BRAKE
4.ORIGIN
4.ORIGIN
4.ORIGIN
4.ORIGIN
<ORIGIN>
<ORIGIN>
<ORIGIN>
<ORIGIN>
1
.DATA 2.MECH
1
.DATA 2.MECH
1
.DATA 2.MECH
1
.DATA 2.MECH
3.JIG 4.ABS
3.JIG 4.ABS
3.JIG 4.ABS
3.JIG 4.ABS
5.USER
5.USER
5.USER
5.USER
<ORIGIN>
<ORIGIN>
<ORIGIN>
<ORIGIN>
1
.DATA 2.MECH
1
.DATA 2.MECH
1
.DATA 2.MECH
1
.DATA 2.MECH
3.JIG 4.ABS
3.JIG 4.ABS
3.JIG 4.ABS
3.JIG 4.ABS
5.USER
5.USER
5.USER
5.USER
Designate the origin setting axis
Designate the origin setting axis
Designate the origin setting axis
Designate the origin setting axis
<JIG>
1
2345678
<JIG>
1
2345678
<JIG>
1
2345678
<JIG>
1
2345678
BRAKE (00000000)
BRAKE (00000000)
BRAKE (00000000)
BRAKE (00000000)
SET AXIS
SET AXIS
SET AXIS
SET AXIS (
1111
0000)
(
1111
0000)
(
1111
0000)
(
1111
0000)
ORIGIN:NOT DEF
ORIGIN:NOT DEF
ORIGIN:NOT DEF
ORIGIN:NOT DEF
<JIG>
<JIG>
<JIG>
<JIG>
CHANGES TO ORIGIN
CHANGES TO ORIGIN
CHANGES TO ORIGIN
CHANGES TO ORIGIN
OK?( )
OK?( )
OK?( )
OK?( )
1
:
1
:
1
:
1
:EXECUTE
EXECUTE
EXECUTE
EXECUTE
Display the origin setting method selection scree
Display the origin setting method selection scree
Display the origin setting method selection scree
Display the origin setting method selection scree
→
→
→
→
→
→
→
→
→
→
→
→
+C
+C
+C
+C
(J6)
(J6)
(J6)
(J6)
5
5
5
5
STU
STU
STU
STU
-Y
-Y
-Y
-Y
(J2)
(J2)
(J2)
(J2)
4
44
4
MNO
MNO
MNO
MNO
+C
+C
+C
+C
(J6)
(J6)
(J6)
(J6)
5
5
5
5
STU
STU
STU
STU
-B
-B
-B
-B
(J5)
(J5)
(J5)
(J5)
1
11
1
DEF
DEF
DEF
DEF
-B
-B
-B
-B
(J5)
(J5)
(J5)
(J5)
1
11
1
DEF
DEF
DEF
DEF
INP
INP
INP
INP
EXE
EXE
EXE
EXE
RPL
RPL
RPL
RPL
↓
↓
↓
↓



































































