





























4Software
List of parameters 4-89
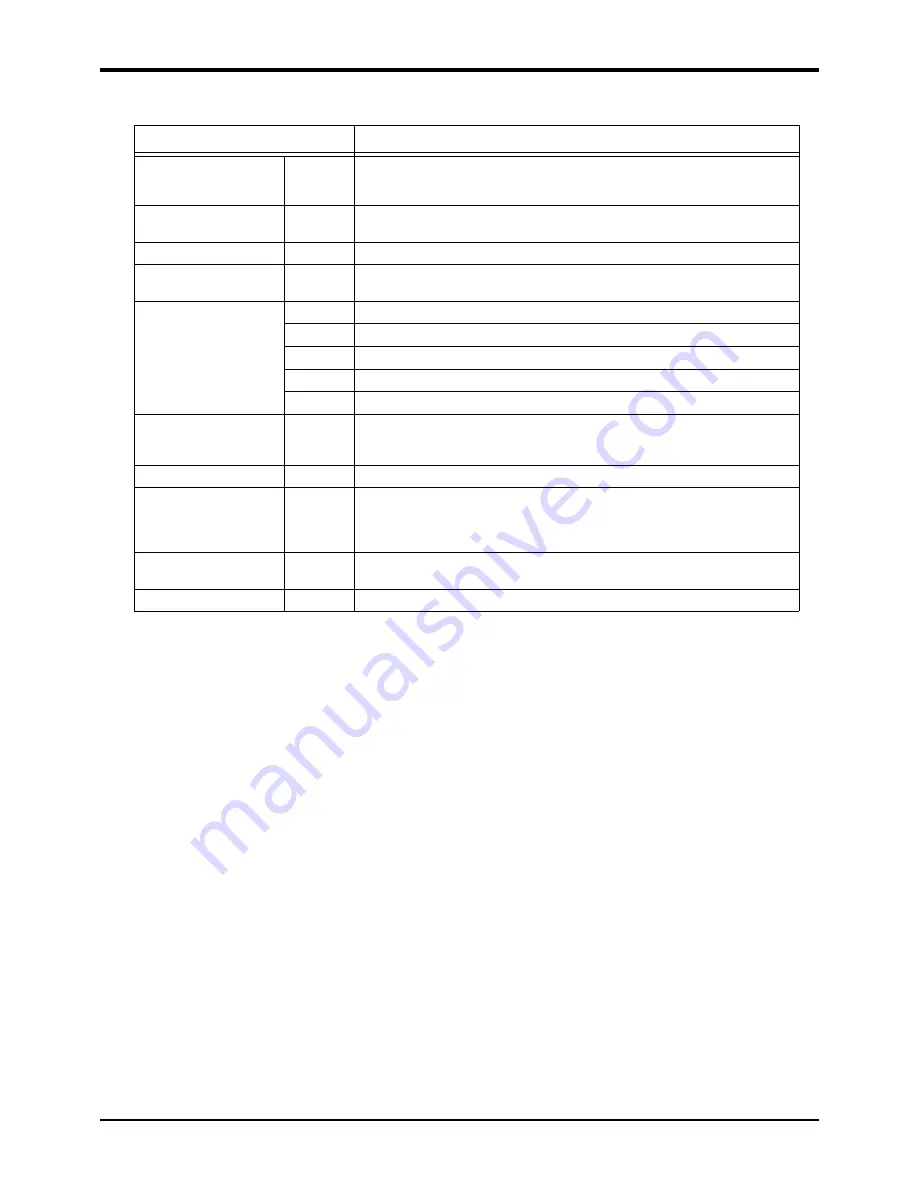
Parameter
Details
Hand type
HANDTYPE
Set the hand type of the single/double solenoid, and the signal No.
(Single/double = S/D)
Set the signal No. after the hand type. Example) D900
Stop input B contact desig
-
nation
INB
Change the dedicated input (stop) between the A contact and B contact.
User-designated origin
USERORG
Designate the user-designated origin position.
Program selection memory
SLOTON
Select the program selected previously when initializing the slot. The non-selected state will
be entered when not set.
Communication setting
CBAU232
Set the baud rate.
CLEN232
Set the character length.
CPRTY232
Set the parity.
CSTOP232
Set the stop bit.
CTERM232
Set the end code.
Slot table
SLT1
:
SLT32
Make settings (program name, operation type, order of priority, etc.) for each slot during slot
initialization.
No. of multi-tasks
TASKMAX
Designate the No. of programs to be executed simultaneously. (Max. 32)
Select the function of
singular point adjacent alarm
MESNGLSW
Designate the valid/invalid of the singular point adjacent alarm.
(Invalid/Valid = 0/1)
When this parameter is set up "VALID", this warning sound is buzzing even if parameter:
BZR (buzzer ON/OFF) is set up "OFF".
Specification of singular point
passage jog mode
FSPJOGMD
Specify an operation mode for singular point passage jog.
Display language.
LNG
Change the language to display on the LCD display of teaching pendant.































































