


























2 Robot arm
Tooling 2-17
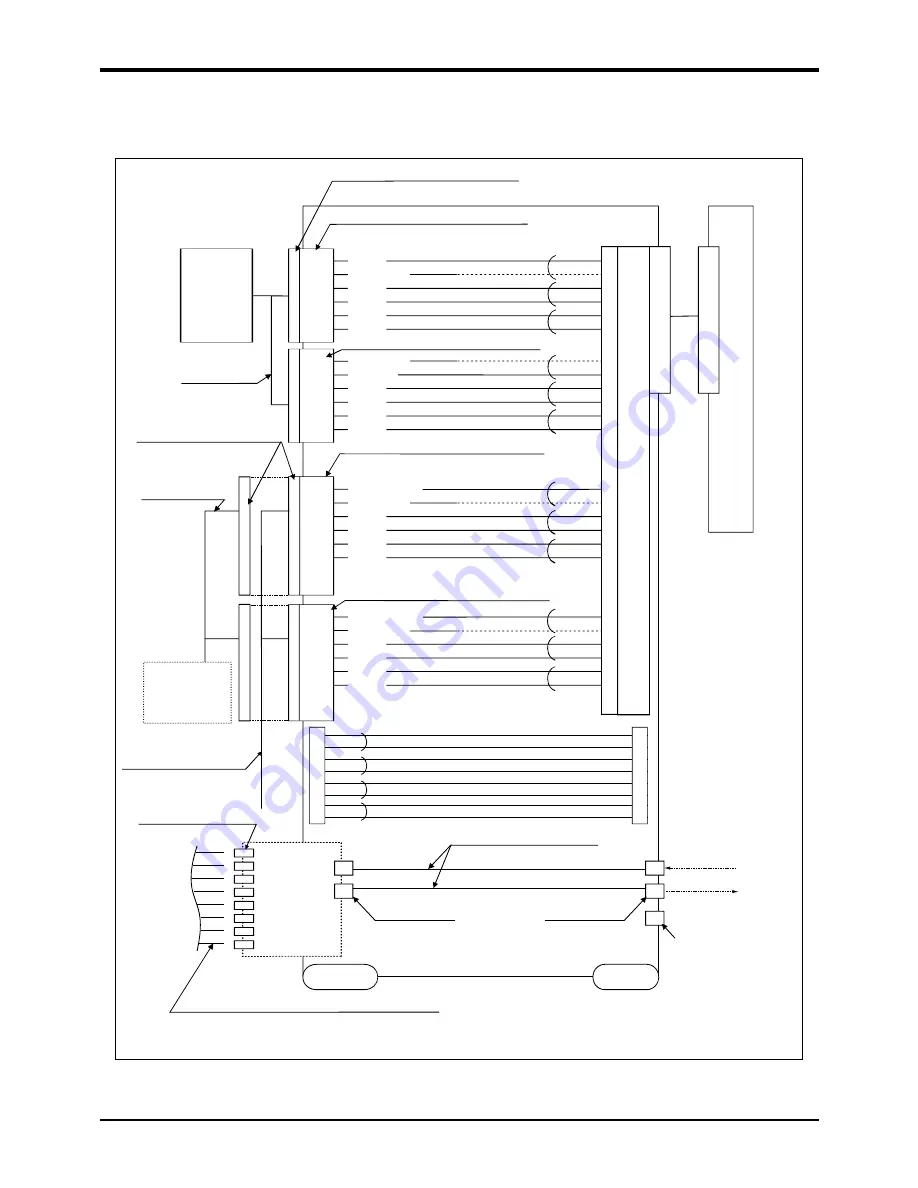
2.5.6 Wiring and piping system diagram for hand
Shows the wiring and piping configuration for a standard-equipped hand.
Fig.2-7 : Wiring and piping system diagram for hand and example the solenoid valve installation(Sink type)
<Reserved>
<24GND>
<HC 5>
<HC 6>
<HC 7>
<HC 8>
White
Black
Hand signal input connector (HC1 connector)
White
Black
White
Black
White
Black
White
Black
White
Black
White
Black
1-1717834-3
(Tyco Electronics AMP)
White
Black
White
Black
White
Black
White
Black
White
Black
1-1318115-3
(Tyco Electronics AMP)
Hand output cable
(option)
1-1717834-4
(Tyco Electronics AMP)
Hand signal output
connection connector
1-1318115-4
(Tyco Electronics AMP)
Secondary pneumatic hose piping (customer-prepared)
φ6 hose
Hand output cable
attached to the solenoid set
Hand input cable
(option)
φ6 quick coupling (1 to 8)
Hand signal input connection connector
Hand signal output connector (GR1 connector)
AIR IN
RETURN
A1
A2
A3
B1
B2
B3
<+24V>
<Reserved>
<HC 1>
<HC 2>
<HC 3>
<HC 4>
A1
A2
A3
A4
B1
B2
B3
B4
<+24V(COM)>
<Reserved>
<GR 1>
<GR 2>
<GR 3>
<GR 4>
<+24V(COM)>
<Reserved>
<GR 5>
<GR 6>
<GR 7>
<GR 8>
1
2
3
4
5
6
7
8
A1
A2
A3
B1
B2
B3
A1
A2
A3
A4
B1
B2
B3
B4
Solenoid set
(option)
valve mounting
section
φ6 quick coupling
φ6 quick coupling
φ6 hose
φ6 hose
Primary piping pneumatic hoses
Yellow
White
Red
Blue
Orange
Driving devices,
such as solenoid
and hand, provided
by the customer
Hand
prepared
by customer
R
o
b
o
t
a
r
m
w
i
r
i
n
g
r
e
l
a
y
b
o
a
r
d
R
o
b
o
t
c
o
n
t
r
o
l
l
e
r
Base
Forearm
Hand signal input connector (HC2 connector)
Hand signal output connector (GR2 connector)
Spare wiring AWG#28(0.1mm
2
)×6 (cab tire cables with the shield)
Green
Black
Brown
VACCUM
AIR PARGE
φ8
*Refer to
Fig. 2-10
for Air
supply circuit example.







































































