
























3 Controller
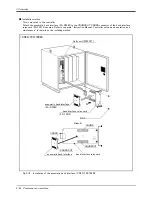
Emergency stop input and output etc. 3-45
Please install the emergency stop switch to the place which is easy to operate it, and
when the robots are the abnormalities, stop the robot immediately.
Be careful of the short circuit with the next terminal at the time of connection of the
electric wire to the EMGIN connector.
Moreover, since solder plating to the electric wire section may wake up loose
connection, please do not carry out.
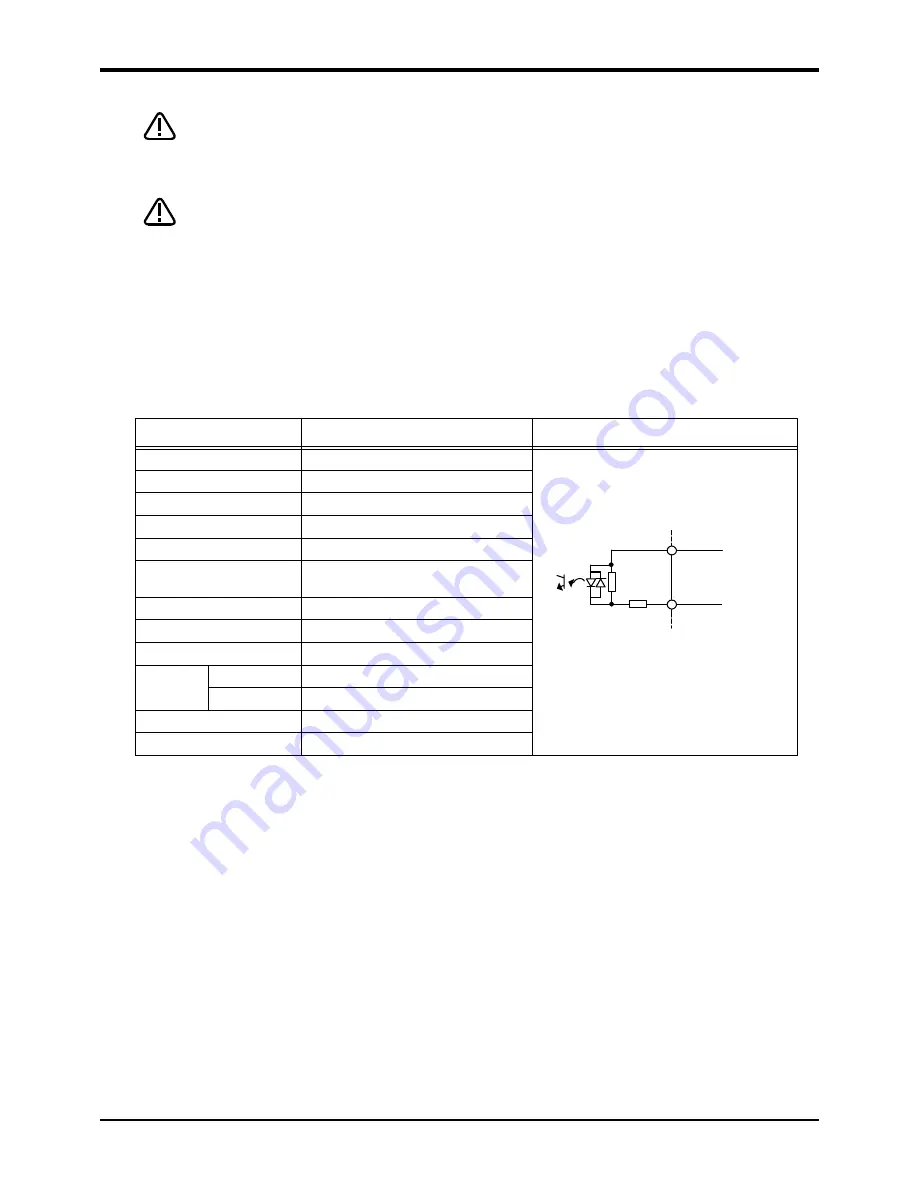
3.6.2 Special stop input(SKIP)
The skip is the input signal to stop the robot. Wire 1A-1B of the special stop connector (SKIP) shown in
Page
46, "Fig.3-11 : Connection of the special-stop-input"
.
Table 3-5 : Special stop input electric specification
Item
Specifications
Internal circuit
Type
D C input
No. of input point
1
Insulation method
Phto-coupler insulation
Rated inpit voltage
D C 2 4 V
Rated input current
approx. 1 1 m A
Working voltage range
D C 2 1 . 6 ~ 2 6 . 4 V
(Ripple rate within 5 %)
ON voltage/ON current
D C 8 V or more / 2 m A or more
OFF voltage/OFF current
D C 4 V or less / 1 m A or less
Input resistance
approx. 2 . 2 k Ω
R e s p o n s e
time
OFF → ON
1 m s or less
ON → OFF
1 m s or less
Common method
1 point per common
External wire connection method
Connector
CAUTION
CAUTION
330
2.2k
入力
+24V(COM)
1A
1B
Input



































































