

























3-54
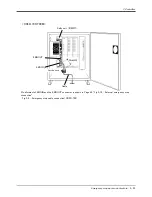
Teaching pendant (T/B)
3 Controller
(1) Teaching pendant (T/B)
■ Order type: R32TB
:Cable length 7m
R32TB-15
:Cable length 15m
■ Outline
This is used to create, edit and control the program, teach the operation position and
for jog feed, etc.
For safety proposes, a 3-position enable switch is mounted.
Note1)
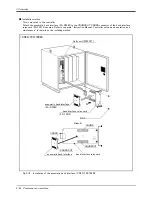
■ Configuration
Table 3-7 : Configuration device
■ Specifications
Table 3-8 : Specifications
Note1) <3-position enable switch>
In ISO/10218 (1992) and JIS-B8433 (1993), this is defined as an "enable device". These standards specify that the
robot operation using the teaching pendant is enabled only when the "enable device" is at a specified position.
With the Mitsubishi Electric industrial robot, the above "enable device" is configured of an "Enable/Disable switch"
and "Deadman switch".
The 3-position deadman switch has three statuses. The following modes are entered according to the switch state.
"Not pressed" ............................... The robot does not operate.
*)
"Pressed lightly".......................... The robot can be operated and teaching is possible.
"Pressed with force" ................. The robot does not operate.
*)
*) Operations, such as program editing and status display, other than robot operation are possible.
Safety is secured as the servo power is turned OFF simultaneously with the input of the emergency stop.
Part name
Type
Qty.
Remarks
Teaching pendant
R32TB
Either one pc.
Cable length is 7m. Hand strap is attached.
R32TB-15
Cable length is 15m. Hand strap is attached.
Items
Specifications
Remarks
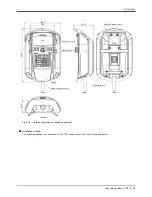
Outline dimensions
195(W) x 292(H) x 106(D) (refer to outline drawing)
Body color
Dark gray
Mass
Approx. 0.9kg (only arm, excluding cable)
Connection method
Connection with controller and square connector (24-pin)
Interface
RS-422
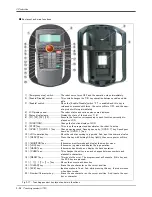
Display method
LCD method: 24 characters x 8 lines, LCD illumination: with backlight
Operation section
36 keys







































































