





























2Unpacking to Installation
Confirming the operation
2-27
・
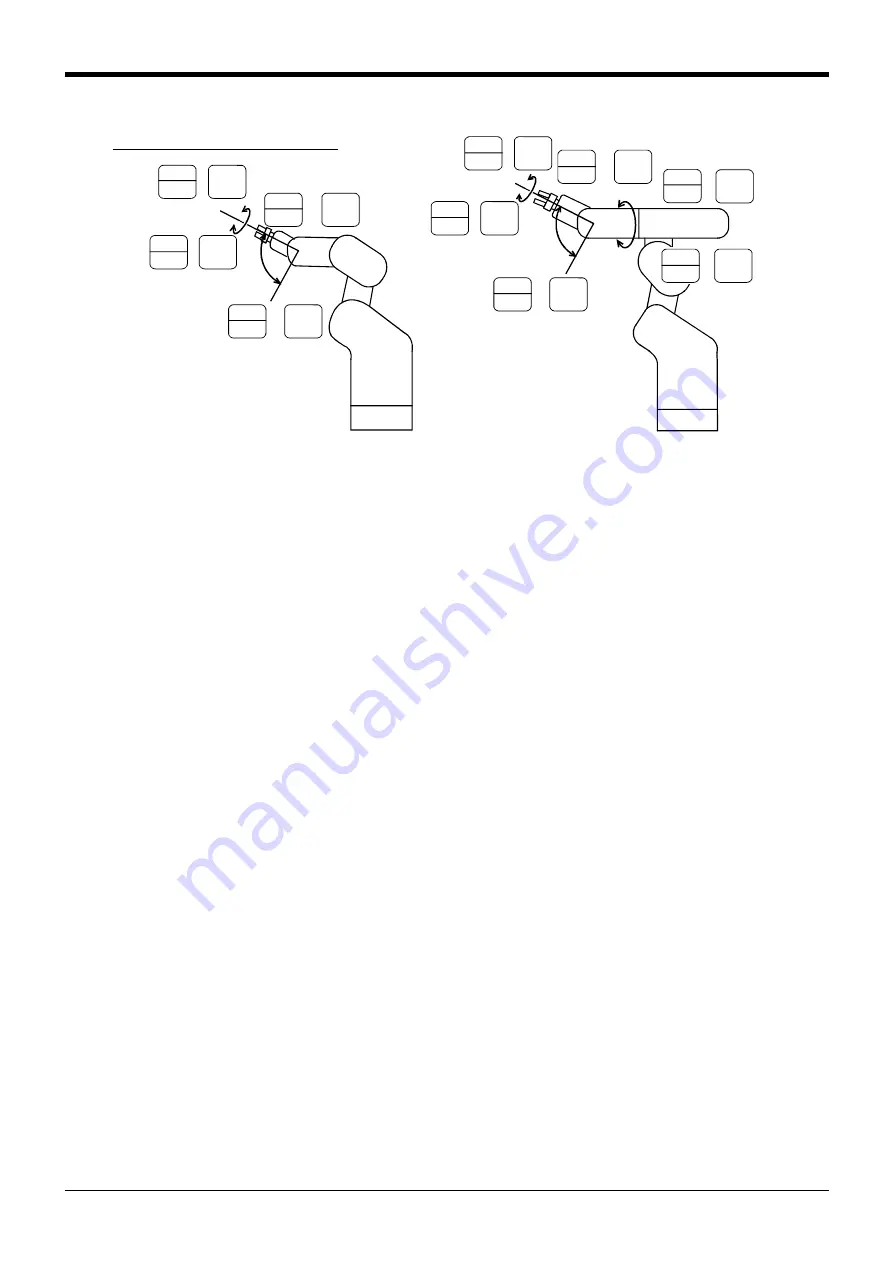
When the [MOVE] + [+A (J4)] keys are pressed, the J4-axis will rotate in the plus direction.
When the [MOVE] + [-A (J4)] keys are pressed, Rotate in the minus direction. (6-axis type only)
・
When the [MOVE] + [+B (J5)] keys are pressed, the J5-axis will rotate in the plus direction.
When the [MOVE] + [-B (J5)] keys are pressed, Rotate in the minus direction.
・
When the [MOVE] + [+C (J6)] keys are pressed, the J6-axis will rotate in the plus direction.
When the [MOVE] + [-C (J6)] keys are pressed, Rotate in the minus direction.
1
DEF
- B
(J5)
STEP
MOVE
+
5
STU
+ C
(J6)
STEP
MOVE
+
5
STU
+ C
(J6)
STEP
MOVE
+
+
-
J5 axis
-
+
J6 axis
+
-
J4 axis
5-axis type
+
-
-
+
J5 axis
J6 axis
1
DEF
- B
(J5)
+
STEP
MOVE
+
0
ABC
- C
(J6)
STEP
MOVE
STEP
MOVE
+
0
ABC
- C
(J6)
STEP
MOVE
+
6
VWX
B
(J5)
7
A
(J4)
STEP
MOVE
+
YZ_
+
6
VWX
B
(J5)
+
+
STEP
MOVE
2
A
(J4)
STEP
MOVE
+
GHI
-
6-axis type
* The flange position changes.
Interpolate the joint, taking care not to change the
control point. operation.
Changing the flange surface posture







































































