





























5Maintenance and Inspection
Maintenance and inspection procedures
5-63
5.3.7 Replacing the backup battery
An absolute encoder is used for the position detector, so the position must be saved with the backup battery
when the power is turned OFF. The controller also uses a backup battery to save the program, etc. These
batteries are installed when the robot is shipped from the factory, but as these are consumable parts, they must
be replaced periodically by the user.
The guideline for replacing the battery is one year, but this will differ according to the robot's usage state. When
the battery life nears, the "Battery cumulative time over alarm (Alarm No. 7520)" will occur. Once the alarm
occurs, replace all batteries in the robot arm and controller as soon as possible. Lithium batteries (type: A6BAT
and ER6) are used in both the controller and robot arm. The procedure of battery replacement of robot arm is
explained below.
(
1
) Replacing the robot arm battery
Don't disconnect connector, etc. While replacing the battery, the encoder position
data is saved by the power supplied from the controller. Thus, if the cable
connection is incomplete, the encoder position data will be lost when the controller
power is turned OFF. Several batteries are used in the robot arm, but replace all old
batteries with new batteries at the same time.
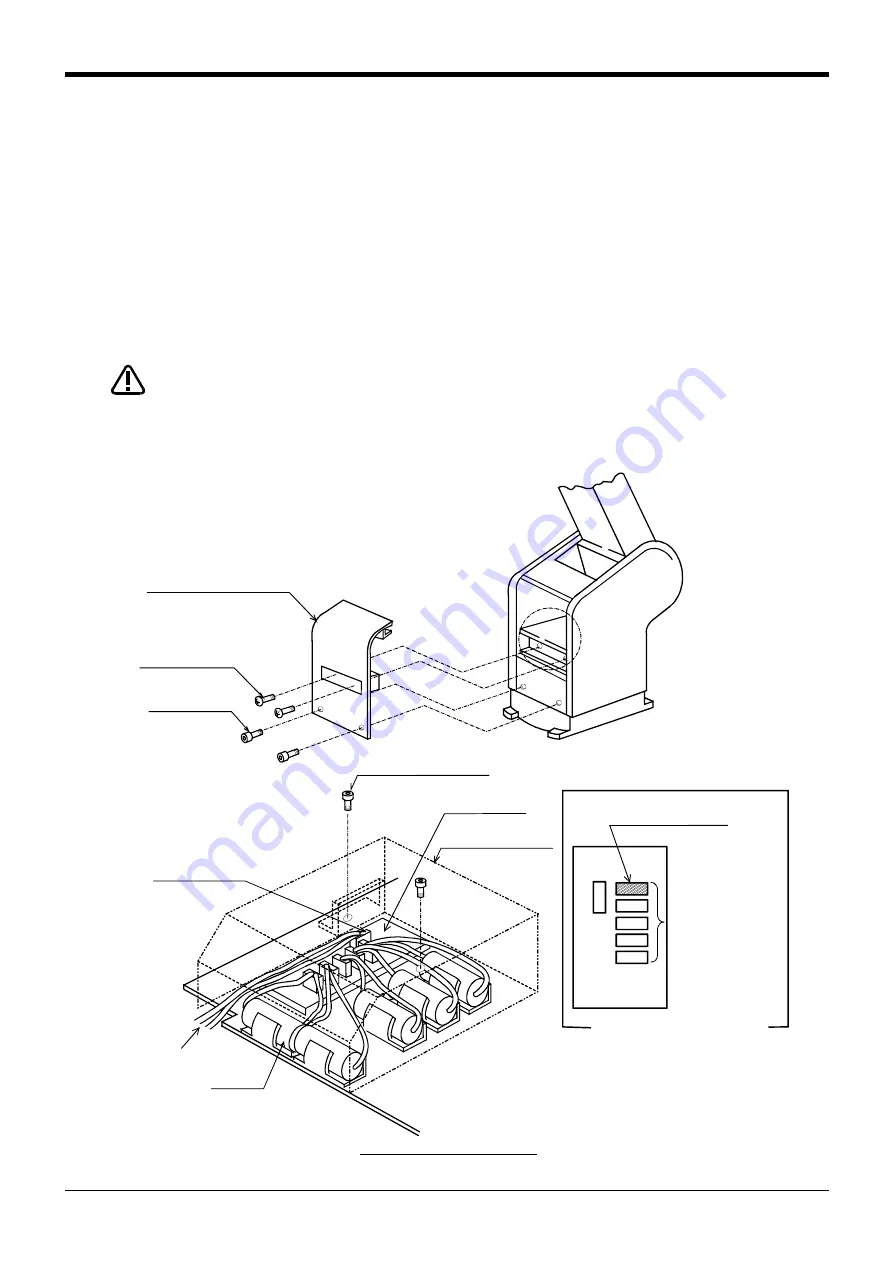
Fig.5-
1
9
:
Replacing the battery
CAUTION
<1> Shoulder cover(B)
<2> Truss screw
(M3 x 8)
<3> Socket
head bolt
Section A
Battery
Detail drawing of section A
<4> Battery cover
<5> Socket head bolt
Lead connector
(M3 x 8)
Battery card
Connect to the robot arm
(M3 x 8)
Battery card (top drawing)
Connect the
battery connector
Note) No use for
5‑axis type.




































































