


















Appendix-99
Configuration flag
6Appendix
6 Appendix
Appendix 1 : Configuration flag
The configuration flag indicates the robot posture.
For the 6-axis type robot, the robot hand end is saved with the position data configured of X, Y, Z, A, B and C.
However, even with the same position data, there are several postures that the robot can change to. The posture
is expressed by this configuration flag, and the posture is saved with FL1 in the position constant (X, Y, Z, A, B, C)
(FL1, FL2).
The types of configuration flags are shown below.
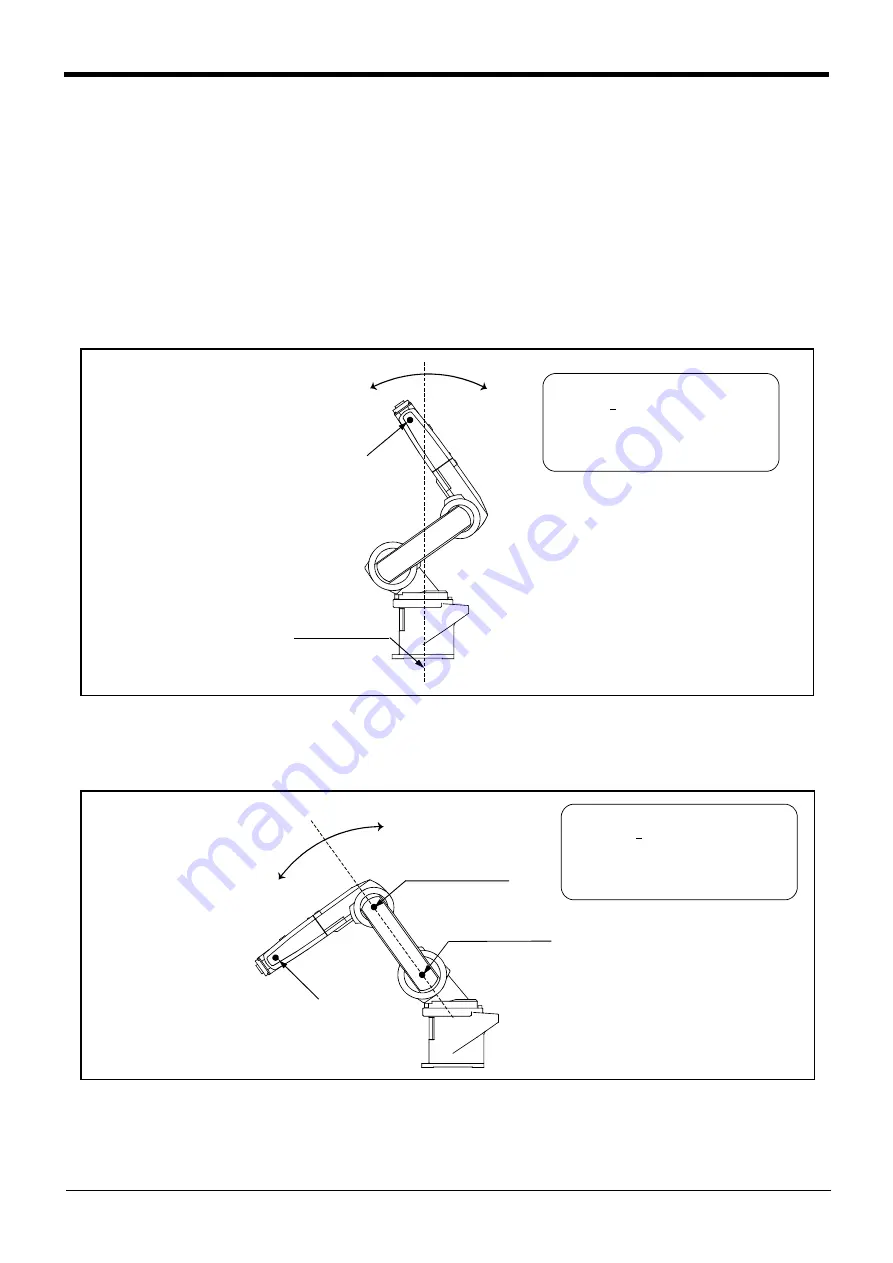
(1) RIGHT/LEFT
Q is center of J5 axis rotation in comparison with the plane through the J1 axis vertical to the ground.
.
Fig.6-1 : Configuration flag (RIGHT/LEFT)
(2) ABOVE/BELOW
Q is center of J5 axis rotation in comparison with the plane through both the J3 and the J2 axis.
.
Fig.6-2 : Configuration flag (ABOVE/BELOW)
RIGHT
LEFT
Q
J1 axis
Rotation center
FL1 (Flag 1)
&B0000 0000
↑
1/0=RIGHT/LEFT
Note) "&B" is shows the binary
J2 axis
Rotation center
J3 axis
Rotation center
Q
ABOVE
BELOW
FL1 (Flag 1)
&B0000 0000
↑
1/0=ABOVE/BELOW
Note) "&B" is shows the binary
Summary of Contents for RV-2F Series
Page 2: ......







































































