



















2-21
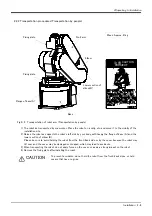
Confirming the operation
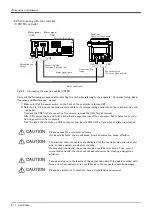
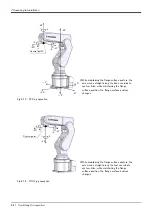
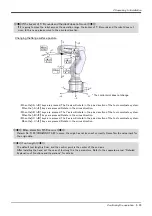
Fig.2-13 : XYZ jog operation
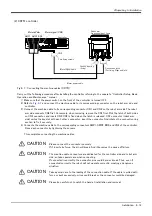
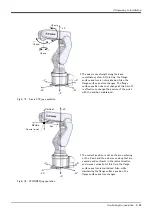
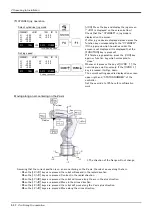
Fig.2-14 : TOOL jog operation
+X
+Y
+Z
-Z
-Y
-X
+
+X
+Y
+Z
-
+
-
-
+
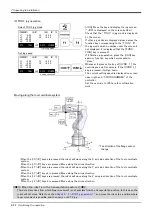
制御点
※ 各軸毎に独立 し て動作 し ます。
5 軸 タ イ プの場合、 J 4 軸はあ り ません。
* While maintaining the flange surface posture, the
axis moves straight along the base coordinate
system. Also, while maintaining the flange
surface position, the flange surface posture
changes.
Control point
+
+X
+Y
+Z
-
+
-
-
+
制御点
※ 各軸毎に独立 し て動作 し ます。
5 軸 タ イ プの場合、 J 4 軸はあ り ません。
* While maintaining the flange surface posture, the
axis moves straight along the tool coordinate
system. Also, while maintaining the flange
surface position, the flange surface posture
changes.
Control point
Summary of Contents for RV-2F Series
Page 2: ......



































































