






















2-29
Confirming the operation
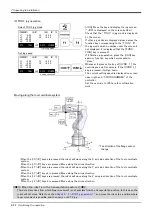
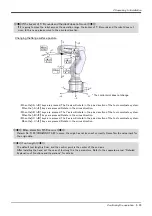
(3) TOOL jog operation
[JOG] Press the key and display the jog screen.
("JOG" is displayed on the screen bottom)
Check that the "TOOL" in jog mode is displayed
on the screen.
If other jog modes are displayed, please press the
function key corresponding to the "TOOL." (If
the jog mode which he wishes under the screen is
not displayed, it is displayed that the [FUNC
-
TION] key is pressed)
If it finishes jog operation, press the [JOG] key
again, or function key which correspond to
"close."
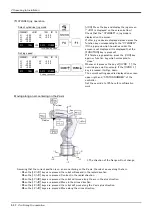
Whenever it presses the key of [OVRD ↑ ], the
override goes up. Conversely, if the [OVRD ↓ ]
key is pressed, it will go down.
The current setting speed is displayed on screen
upper right, and "STATUS NUMBER" of the
controller.
Set the override to 10% here for confirmation
work
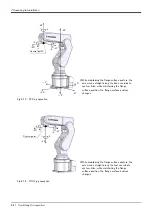
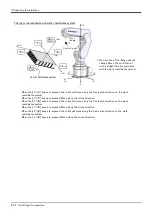
・When the [+X (J1)] keys are pressed, the robot will move along the X axis plus direction of the tool coordinate
system.
When the [-X (J1)] keys are pressed, Move along the minus direction.
・When the [+Y (J2)] keys are pressed, the robot will move along the Y axis plus direction of the tool coordinate
system.
When the [-Y (J2)] keys are pressed, Move along the minus direction.
・When the [+Z (J3)] keys are pressed, the robot will move along the Z axis plus direction of the tool coordinate
system.
When the [-Z (J3)] keys are pressed, Move along the minus direction.
Select TOOL jog mode
Set jog speed
Setting the speed
TOOL jog mode
<CURRENT> JOINT 100% M1 T0
J1: +0.00 J5: +0.00
J2: +0.00 J6: +0.00
J3: +90.00 :
J4: +0.00 :
CYLNDR
JOG
TOOL
XYZ
3-XYZ
⇒
<CURRENT> JOINT 100% M1 T0
J1: +0.00 J5: +0.00
J2: +0.00 J6: +0.00
J3: +90.00 :
J4: +0.00 :
CYLNDR
JOG
TOOL
XYZ
3-XYZ
⇒
~
+X
+Y
+Z
-Z
-Y
-X
+X
+Y
+Z
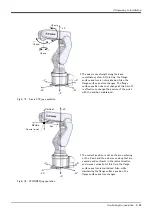
Moving along the tool coordinate system
* The direction of the flange will not
change
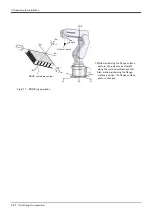
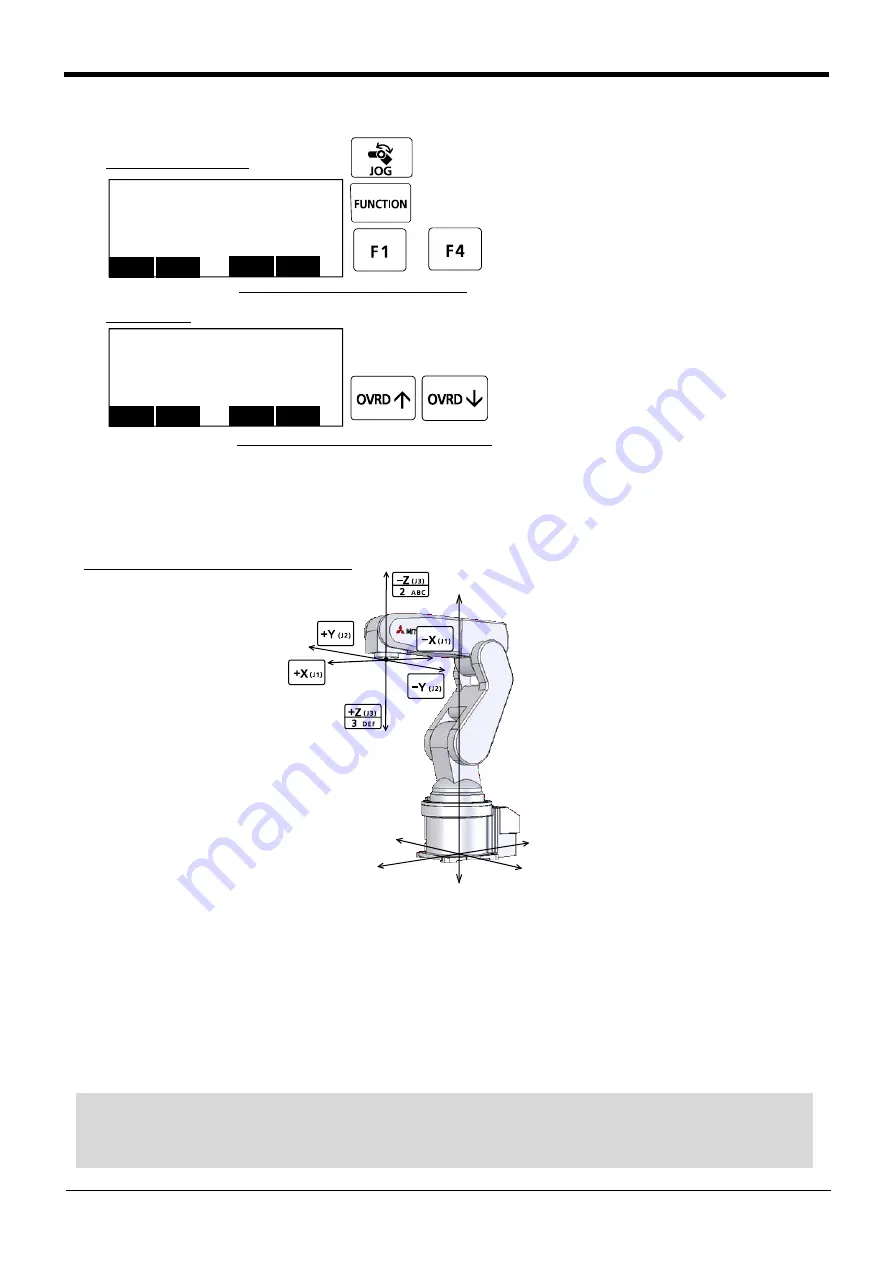
◇◆◇ When the robot is in the transportation posture ◇◆◇
There are directions from which linear movement is not possible from the transportation posture. In this case, the
robot will not move. Refer to section
Page 24, "(1) JOINT jog operation"
", and move the robot to a position where
linear movement is possible, and then carry out XYZ jog.
Summary of Contents for RV-2F Series
Page 2: ......



































































