






















Confirming the operation 2-30
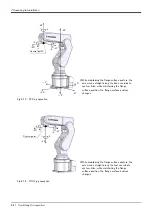
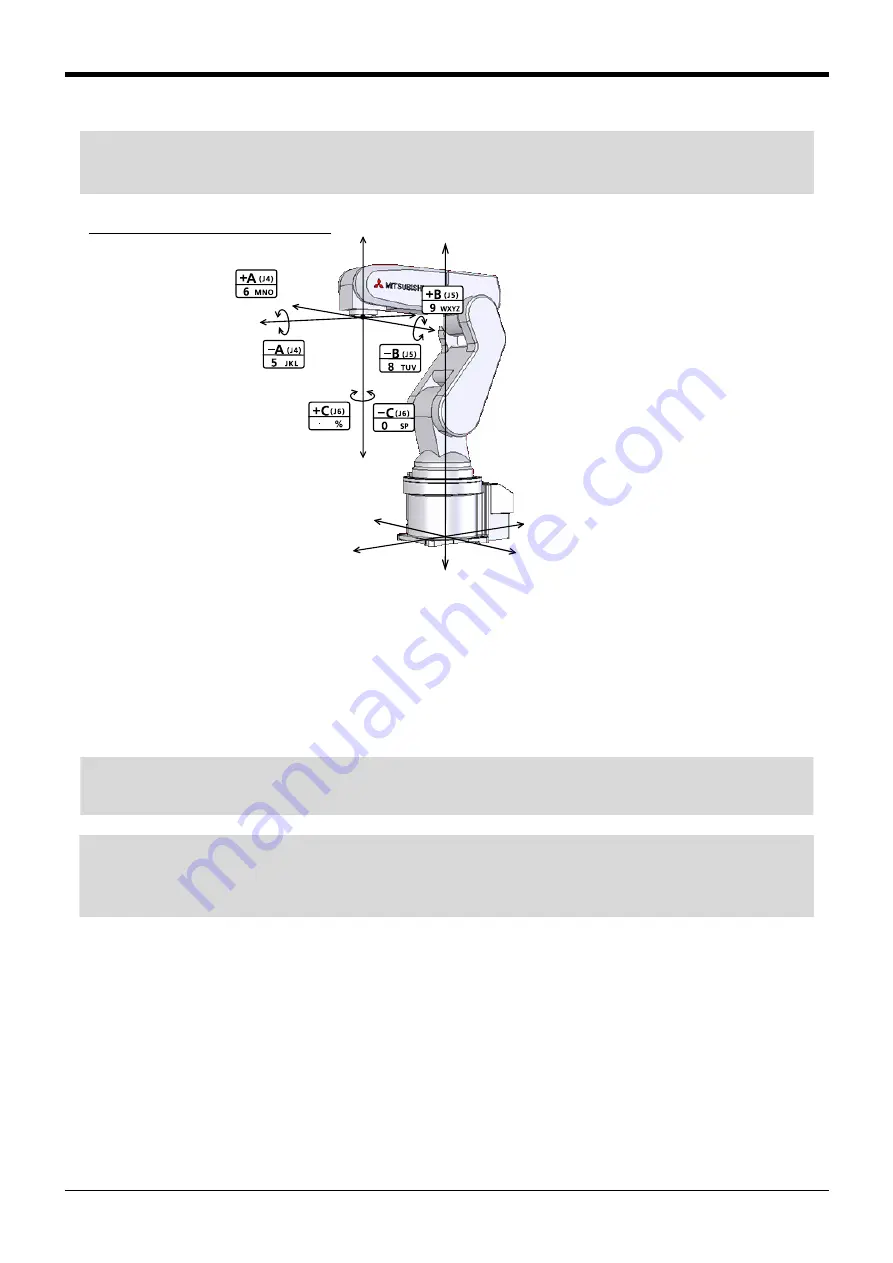
・ When the[+A (J4)] keys are pressed, The X axis will rotate in the plus direction of the tool coordinate system.
When the[-A (J4)] keys are pressed, Rotate in the minus direction.
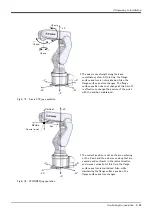
・ When the[+B (J5)] keys are pressed, The Y axis will rotate in the plus direction of the tool coordinate system.
When the[-B (J5)] keys are pressed, Rotate in the minus direction.
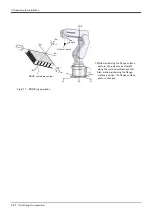
・ When the[+C (J6)] keys are pressed, The Z axis will rotate in the plus direction of the tool coordinate system.
When the[-C (J6)] keys are pressed, Rotate in the minus direction.
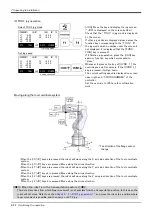
◇◆◇If the buzzer of T/B sounds and the robot does not move ◇◆◇
If it is going to move the robot across the operation range, the buzzer of T/B sounds and the robot does not
move. In this case, please move to the counter direction.
Changing the flange surface posture
* The control point does not change.
+X
+Z
+
-
-
-
+
+Y
+X
+Y
+Z
-Z
-Y
-X
+
-Z
◇◆◇ When alarm No. 5150 occurs ◇◆◇
If alarm No. 5150 (ORIGIN NOT SET) occurs, the origin has not been set correctly. Reconfirm the value input for
the origin data.
◇◆◇ Tool length ◇◆◇
The default tool length is 0mm, and the control point is the center of the end axis.
After installing the hand, set the correct tool length in the parameters. Refer to the separate manual "Detailed
Explanation of Functions and Operations" for details.
Summary of Contents for RV-2F Series
Page 2: ......







































































