
























Confirming the operation 2-40
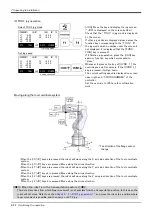
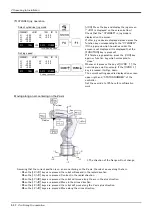
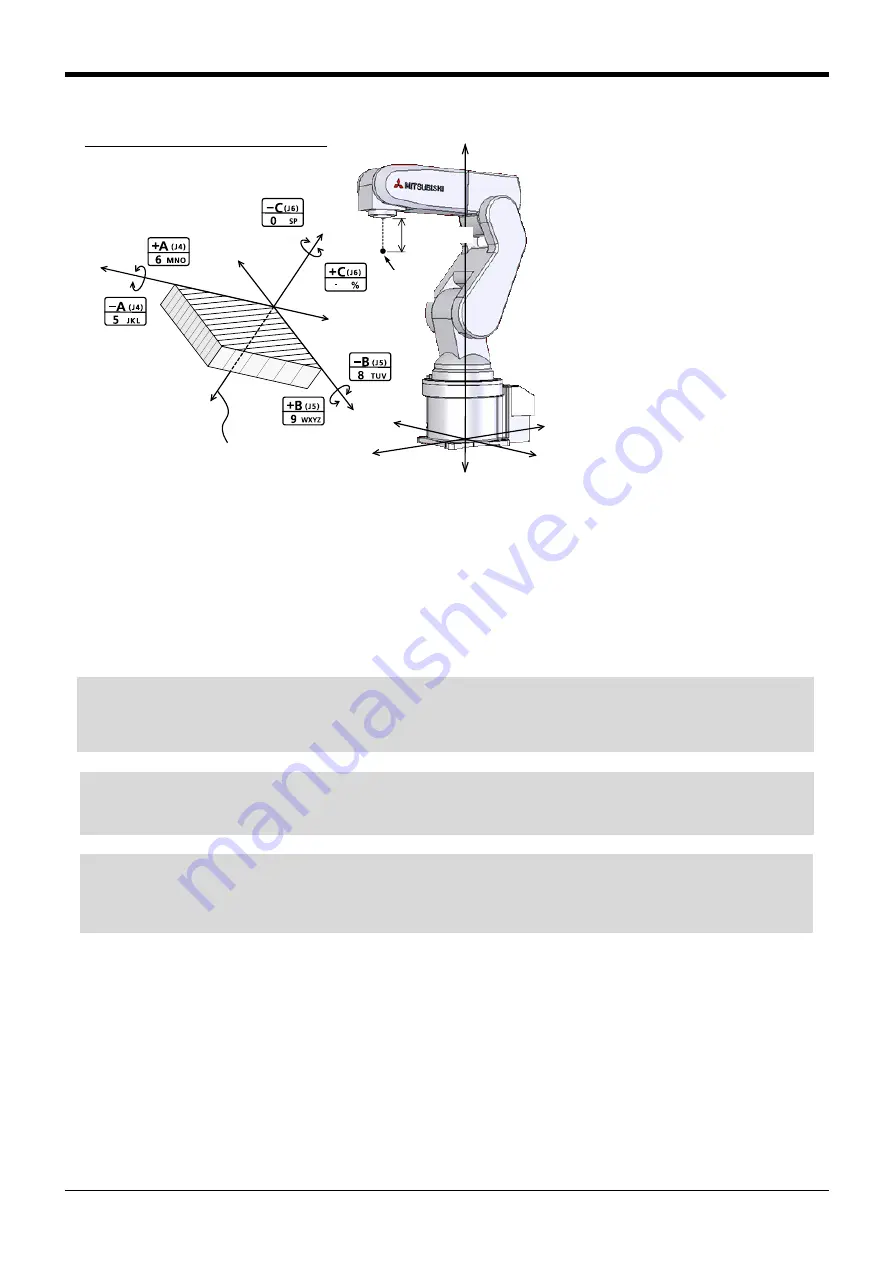
・When the[+A (J4)] keys are pressed, The X axis will rotate in the plus direction of the work coordinate system.
When the[-A (J4)] keys are pressed, Rotate in the minus direction.
・When the[+B (J5)] keys are pressed, The Y axis will rotate in the plus direction of the work coordinate system.
When the[-B (J5)] keys are pressed, Rotate in the minus direction.
・When the[+C (J6)] keys are pressed, The Z axis will rotate in the plus direction of the work coordinate system.
When the[-C (J6)] keys are pressed, Rotate in the minus direction.
+X
+Y
+Z
-Z
-Y
-X
+
-
+
-
-
+
+Xw
+Yw
+Zw
ツール長
制御点
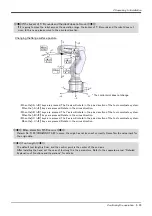
Changing the flange surface posture
* The position of the control point
does not change. Change the
direction of the flange in
accordance with the work
coordinates system.
Work coordinates system
Tool length
Controll
point
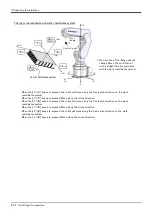
◇◆◇ When the robot is in the transportation posture ◇◆◇
There are directions from which linear movement is not possible from the transportation posture. In this case, the
robot will not move. Refer to section
Page 24, "(1) JOINT jog operation"
", and move the robot to a position where
linear movement is possible, and then carry out XYZ jog.
◇◆◇If the buzzer of T/B sounds and the robot does not move ◇◆◇
If it is going to move the robot across the operation range, the buzzer of T/B sounds and the robot does not
move. In this case, please move to the counter direction.
◇◆◇ Tool length ◇◆◇
The default tool length is 0mm, and the control point is the center of the end axis.
After installing the hand, set the correct tool length in the parameters. Refer to the separate manual "Detailed
Explanation of Functions and Operations" for details.
Summary of Contents for RV-2F Series
Page 2: ......







































































